
Начну с небольшой предыстории:
Изначально я не планировал собирать такого робота, мне просто нужны были 2 детских огнетушителя — брызгалки, для детских конкурсов.
в магазинах города найти не удалось, а в интернете я случайно наткнулся робота с танковым шасси и водометом на борту.
поскольку у меня мало времени и совсем нет опыта, я и не думал сам что либо собирать, попросил человека продать готовое устройство. Но мне отказали и предложили — собери сам…
Начал с поиска чего либо интересного в интернет магазинах. и на разных форумах.
нашел такой вариант:

но посмотрев видео обзоры понял что шасси неустойчивое и может опрокидываться при резких стартах и торможении.
в общем в итоге после долгих поисков и обсуждений на форумах, купил такой комплект:
платформа: Wild Thumper 6WD Black 75:1 with 2 encoders
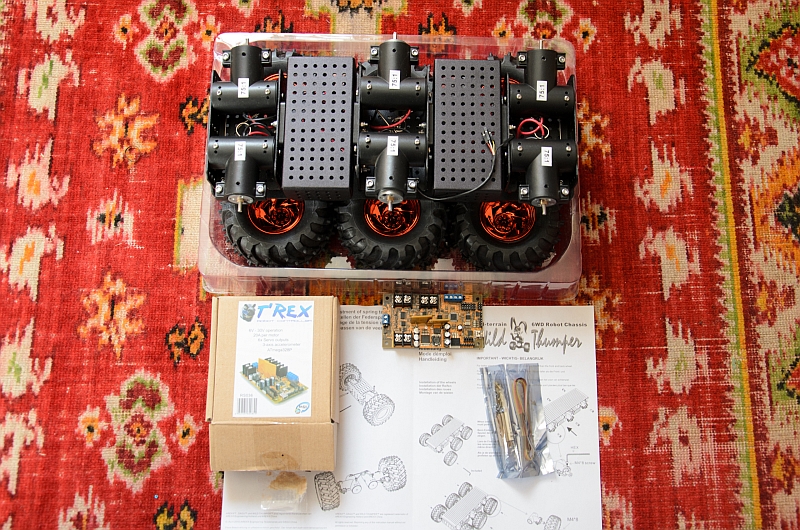
плата управления TREX controller — он же ардуино контролер.

так же для управления потребовался блютус модуль HC-06

для водомета были куплены такие детали:
2х осевой вращатель камеры

Сервопривод Tower Pro 9g SG90 две штуки:

Водяной насос (помпа)

комплект капельницы из аптеки(гибкий шланг)
Сборка не заняла много времени, и как я думал вначале все будет быстро и легко.
собрал, включил — поехали…
но меня ждали ГРАБЛИ 🙂
1. моя ошибка — источник питания, я наивно полагал что простых батареек для теста хватит. для работы ардуино — вполне, для двигателей НЕТ!

далее из одной крайности в другую:
тяжелый свинец на 12в 7,4 амперчаса…
из за тяжелого веса и повышенной мощности, от резких стартов была сорвана шестерня в редукторе, найти нужную не удалось, пришлось заказывать с интерет магазинов мотор редуктор в сборе.

2. основная проблема, которая отняла много времени и сил — «хитрая» плата управления.
дело в том что на ней изначально есть разъем для подключения блютус модуля, и если в него включить модуль этого же производителя, то все заработает, если стороннего то нет!
все дело в том что сигнальные контакты RX и TX нужно менять местами!
3. к моей необычной плате управления шли примеры программы(скетч) и приложение для андроида, управлялка с телефона

но почему то программа управления страшно глючила, машина с трудом двигалась вперед, дергаясь в конвульсиях.
не без помощи добрых людей удалось состряпать новый скетч именно под мою платформу.
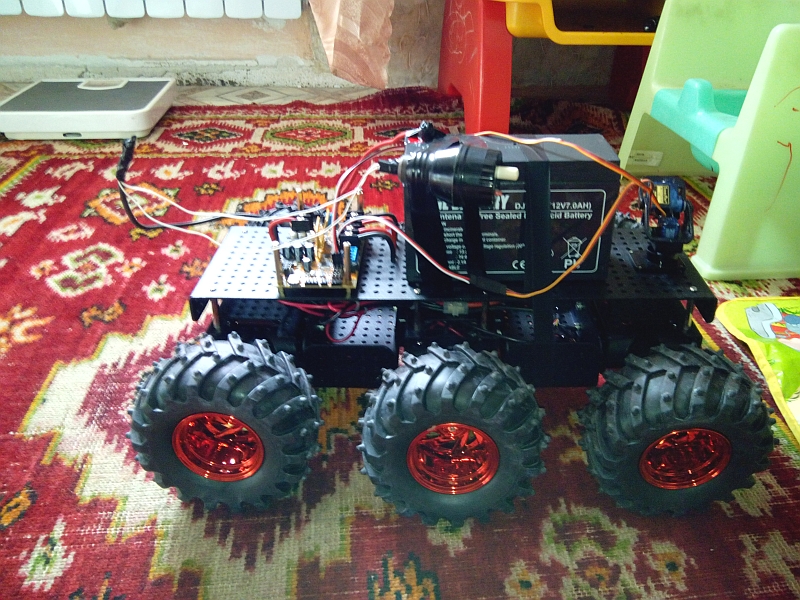
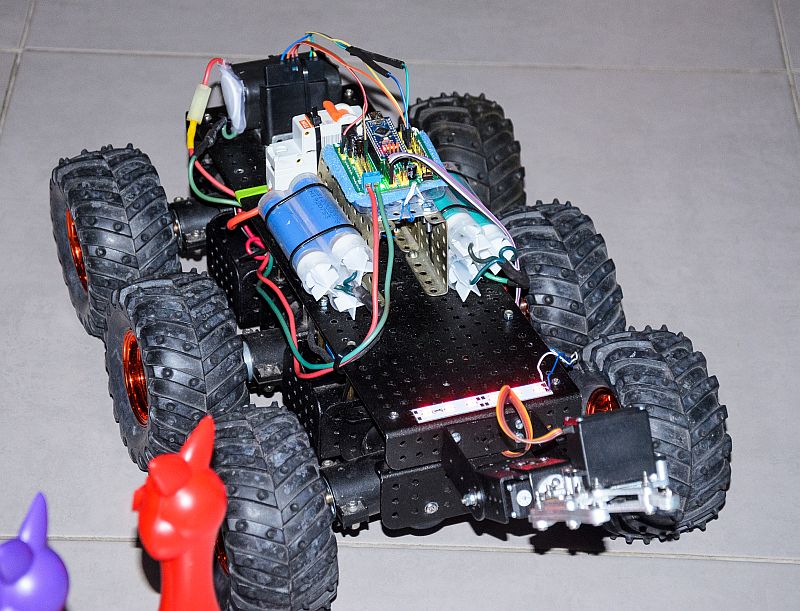
на первом, полноценном этапе получилось такое чудо:

машина с 6х6 с тяжелым акумом и водометом. в качестве кнопки включения служила старая пробка 🙂
а тут видео как это работало:
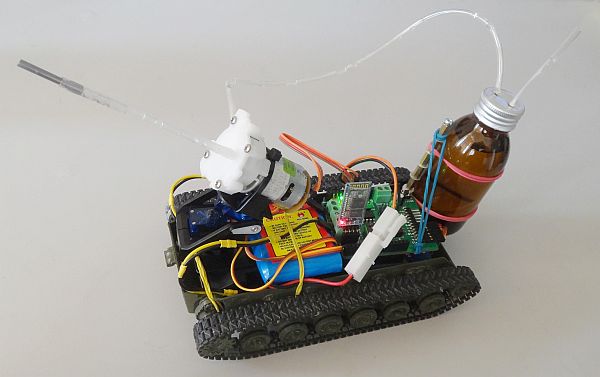
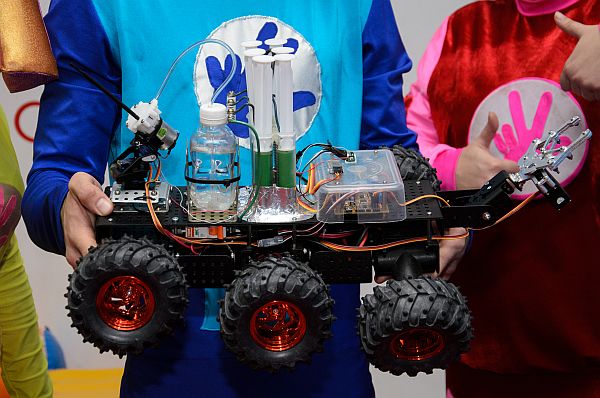
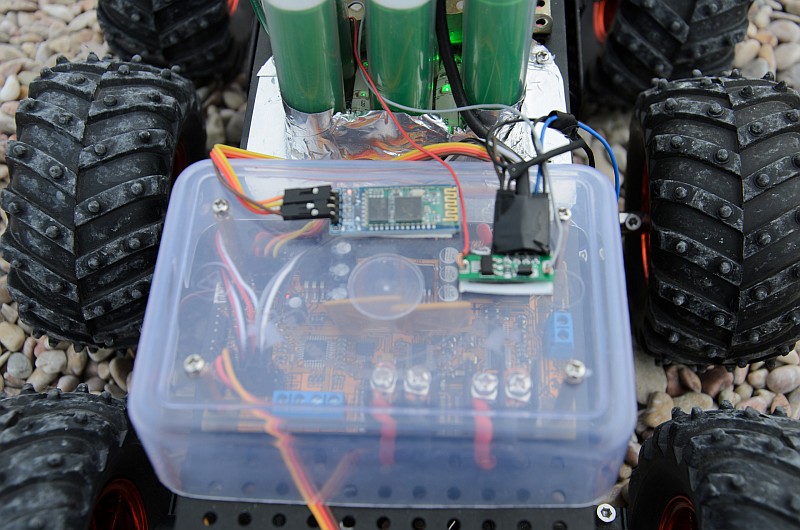
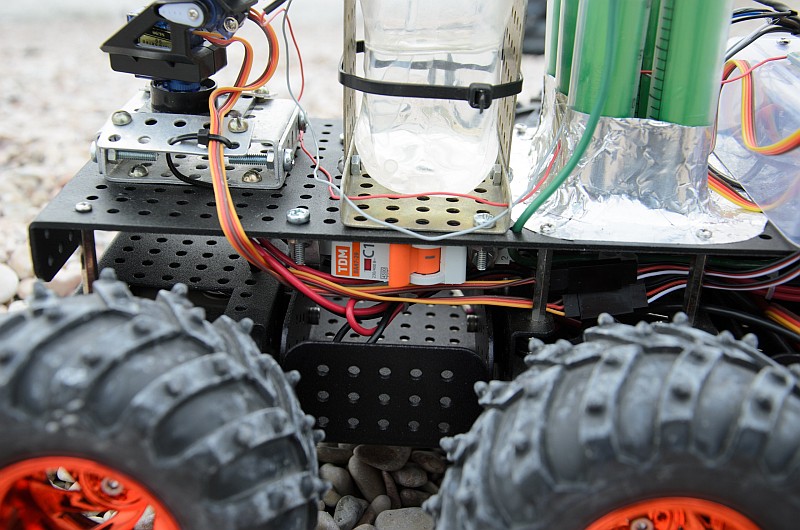
на данный момент у меня такая тележка:
как видно на фото полностью поменялась компоновка, теперь спереди стоит захват манипулятора. а водомет позади.


в качестве аккумуляторов было решено использовать «банки» от испорченного ноутбучного акума. всего 6 банок.
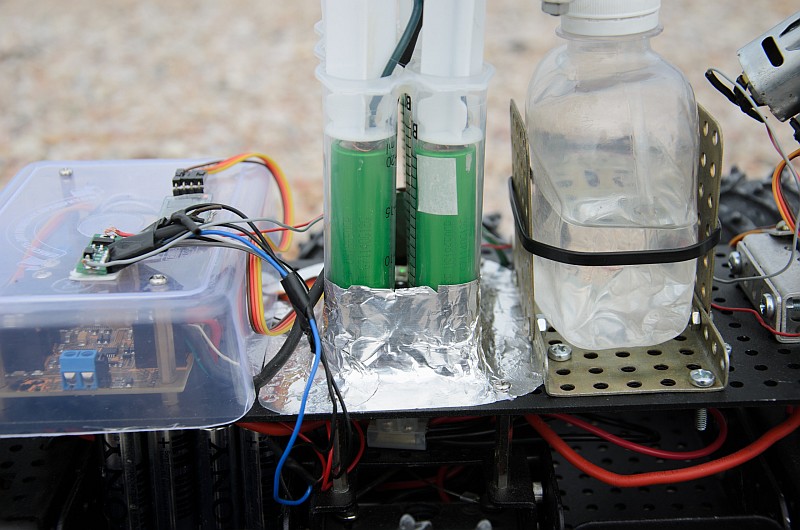
я долго искал для них бат блоки, но к сожалению на них оказался дефицит. на местном радио рынке блок под 1 акум, купил и пожалел об этом, он оказался с очень хлипкими проводами, и тут в голову пришла идея со шприцами, они идеально подошли для этой цели!
вместо старой пробки был куплен новый пакетник 🙂
на видео машина используется по назначению — развлекает детей на детском празднике.
а тут презентационный ролик ))
испытания проходимости
недавно решил что робот должен обладать хоть немного автоматизмом.
и как раз была у меня одна незадействованая кнопка, сделал на нее функцию автоматического захвата предметов
для управления использую смартфон, и приложение BTCA2A
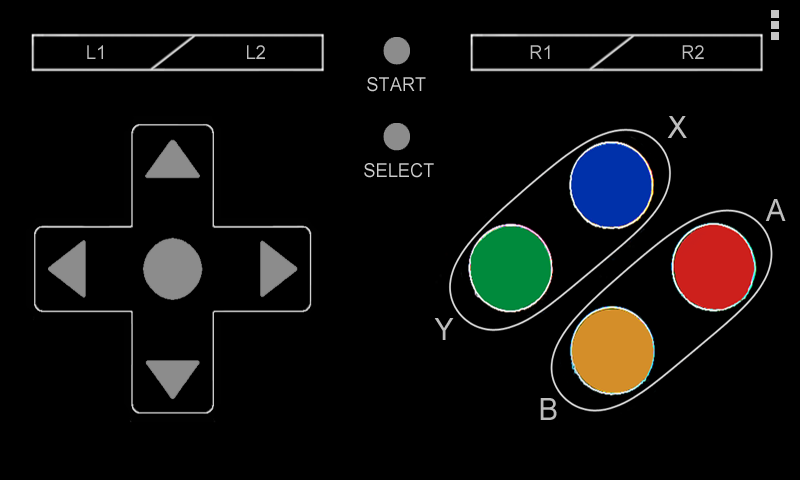
подробнее о нем можно почитать: http://robocontroller.ru/news/btca2a_upravlenie_arduino_po_bluetooth_pri_pomoshhi_android/2013-11-16-40
проект находиться в стадии разработки, ожидаю с недели на неделю новые запчасти, а именно механизм стрельбы 6мм шариками от модели танков. буду делать пушку 🙂
забыл выложить скетч:
// Скетч для управления через блютус, Wild Thumper 6WD, на ардуино совместимом контролере TREX controller. реализовано движение и стрельба с водомета, захват клешней манипулятором.
// по вопросам и предложениям писать на почту slom1@list.ru
// новые фото и видео можно найти на www.шоуальянс.com
#include <BTCA2ALite.h>// Добавляем библиотеку блютус программы
#include <Servo.h> // Добавляем библиотеку серво
Servo myservoH; // Горизонтальная серва углы от 0 до 180 (центровка 89)
Servo myservoV; // Вертикальная серва углы от 1 до 45
Servo myservoZ; // серва Клешня
Servo myservoR; // серва рука клешни
const int Z_SERVO_PIN = 5; // добовляем пин захвата
const int R_SERVO_PIN = 6; // добовляем пин руки манипулятора
const int H_SERVO_PIN = 7; // Горизонтальная серва подключена к пину 7
const int V_SERVO_PIN = 8; //Пин вертикального сервопривода 8
const float Z_L_ANGLE = 116; // Максимальные угл поворота башни налево
const float Z_R_ANGLE = 45; // Максимальные угл поворота башни направо
const float Z_DEF_ANGLE = 50; // Дефолтный угол (центровка)
const float R_L_ANGLE = 170; // Максимальные угл поднятия руки
const float R_R_ANGLE = 3; // Максимальные угл наклона руки
const float R_DEF_ANGLE = 160; // Дефолтный угол руки
const float H_L_ANGLE = 180; // Максимальные угл поворота башни налево
const float H_R_ANGLE = 0; // Максимальные угл поворота башни направо
const float H_DEF_ANGLE = 84; // Дефолтный угол (центровка)
const float V_U_ANGLE = 175; // Максимальные угл поворота башни вверх
const float V_D_ANGLE = 125; // Максимальные угл поворота башни вниз
const float V_DEF_ANGLE = 160; // Дефолтный угол (центровка)
//Размер шага V_STEP и H_STEP побираем экспериментально для достижения нужной скорости поворота серв
const float V_STEP = 0.012; // Шаг - знаение отвечающее за скорость вращения по вертикали.
const float H_STEP = 0.012; // Шаг - знаение отвечающее за скорость вращения по горизонтали
const float Z_STEP = 0.012; // шаг захвата
const float R_STEP = 0.012; // шаг руки
float curVAngle = V_DEF_ANGLE; //Переменная текущего угла верт. сервы
float curHAngle = H_DEF_ANGLE; //Переменная текущего угла гор. сервы
float curZAngle = Z_DEF_ANGLE; //
float curRAngle = R_DEF_ANGLE; //
bool moveServoVUp = false; //Флаг движения верт. сервы вверх
bool moveServoVDown = false; //Флаг движения верт. сервы вниз
bool moveServoHLeft = false; //Флаг движения гор. сервы влево
bool moveServoHRight = false; //Флаг движения гор. сервы вправо
bool moveServoZLeft = false; //Флаг движения гор. сервы влево
bool moveServoZRight = false; //Флаг движения гор. сервы вправо
bool moveServoRLeft = false; //Флаг движения гор. сервы влево
bool moveServoRRight = false; //Флаг движения гор. сервы вправо
btca2aLite btca2aLite; // Конструктор btca2aLite
// задаем пины для левого мотора
#define Dir_L 2
#define Pwm_L 3
#define Brake_L 4
// задаем пины для правого мотора
#define Dir_R 10
#define Pwm_R 11
#define Brake_R 9
// Задаем скорости для движения
byte MaxSpeed = 230; // Максимальная скорость
byte MinSpeed = 90; // Минимальная скорость
int forw_back = 0;
int righ_left = 0;
byte step_fb = 5; // Шаг изменения скорости движения вперед - назад
byte step_stop = 10; // Шаг изменения скорости остановки
byte step_rl = 10; // Шаг изменения скорости движения вправо - влево
byte step_dir = 10; // Шаг изменения скорости выравнивания
#define SHOT 12 // пин для водомета
enum States
{
WAITING,
READING,
RUNNING,
ERROR,
TIMEOUT
};
States state;
States onWait();
States onRead();
States onRun();
States onError();
States onTimeout();
void performServo(); // добовляем сервы
void setup(){
Serial.begin(9600); // Скорость BT и порта должна быть 9600
//Моторы
pinMode (Pwm_L, OUTPUT);
pinMode (Dir_L, OUTPUT);
pinMode (Brake_L, OUTPUT);
pinMode (Pwm_R, OUTPUT);
pinMode (Dir_R, OUTPUT);
pinMode (Brake_R, OUTPUT);
digitalWrite (Pwm_L, LOW);
digitalWrite (Pwm_R, LOW);
digitalWrite (Brake_L, LOW);
digitalWrite (Brake_R, LOW);
pinMode(SHOT, OUTPUT); // задаем выход для стрельбы водой
// устанавливаем пин как вывод управления сервой
myservoH.attach(H_SERVO_PIN);
myservoV.attach(V_SERVO_PIN);
myservoZ.attach(Z_SERVO_PIN);
myservoR.attach(R_SERVO_PIN);
myservoH.write(curHAngle);
myservoV.write(curVAngle);
myservoZ.write(curZAngle);
myservoR.write(curRAngle);
//Светодиод
pinMode(13, OUTPUT); // Инициализируем пин светодиода
digitalWrite(13, HIGH); // Светодиод выключен
}
void loop(){
btca2aLite.ReadCommand(); // Считывание принятых команд (кодов кнопок)
//Вызываем функцию управление сервами
performServo();
//этот код для меня темный лес, мне его дали для плавного старта и торможения моторов. если ехать вперед и резко нажать кнопку назад, машина продолжит ехать вперед, плавно остановиться и только потом поедет назад, это спасает редуктора от разрушения.
//если ктото знает что тут к чему, прокоментируйте пожалуйста, чтоб я тоже понимал :)
static unsigned long pre_millis = 0;
if(millis()-pre_millis > 50)
{
pre_millis = millis();
if(btca2aLite.ButtonPressed(KEYCODE_DPAD_UP))
{
forw_back += step_fb;
if(forw_back > 0 && forw_back < MinSpeed) forw_back = MinSpeed;
}
else if(btca2aLite.ButtonPressed(KEYCODE_DPAD_DOWN))
{
forw_back -= step_fb;
if(forw_back < 0 && forw_back > MinSpeed*-1) forw_back = MinSpeed*-1;
}
else
{
if(forw_back < 0) forw_back += step_stop;
else if(forw_back > 0) forw_back -= step_stop;
if(abs(forw_back) < MinSpeed) forw_back = 0;
}
forw_back = constrain(forw_back, MaxSpeed*-1, MaxSpeed);
if(btca2aLite.ButtonPressed(KEYCODE_DPAD_RIGHT))
{
righ_left += step_rl;
if(righ_left > 0 && righ_left < MinSpeed) righ_left = MinSpeed;
}
else if(btca2aLite.ButtonPressed(KEYCODE_DPAD_LEFT))
{
righ_left -= step_rl;
if(righ_left < 0 && righ_left > MinSpeed*-1) righ_left = MinSpeed*-1;
}
else
{
if(righ_left < 0) righ_left += step_dir;
else if(righ_left > 0) righ_left -= step_dir;
if(abs(righ_left) < MinSpeed) righ_left = 0;
}
righ_left = constrain(righ_left, MaxSpeed*-1, MaxSpeed);
int pwm_l = forw_back + righ_left;
int pwm_r = forw_back - righ_left;
pwm_l = constrain(pwm_l, MaxSpeed*-1, MaxSpeed);
pwm_r = constrain(pwm_r, MaxSpeed*-1, MaxSpeed);
digitalWrite(Dir_L, (pwm_l<0)?0:1);
digitalWrite(Dir_R, (pwm_r<0)?0:1);
analogWrite(Pwm_L, abs(pwm_l));
analogWrite(Pwm_R, abs(pwm_r));
}
//дальше идут кнопки управления
//-------— включение насоса —-------------
if (btca2aLite.ButtonPressed(KEYCODE_BUTTON_SELECT))
{
digitalWrite (SHOT, HIGH);
}
//-------— выключение насоса происходит автоматически после отпускания кнопки—-------------
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_SELECT))
{
digitalWrite (SHOT, LOW);
}
if(btca2aLite.Button(KEYCODE_BUTTON_START)) // алгоритм автоматического хватания предметов
{
// машина делает шаг вперед
digitalWrite (Dir_L, HIGH);
analogWrite (Pwm_L, 150);
digitalWrite (Dir_R, HIGH);
analogWrite (Pwm_R, 150);
delay (100);
// потом стоп
analogWrite (Pwm_L, 0);
analogWrite (Pwm_R, 0);
delay (500);
myservoZ.write(45);; // Клешня разжимается
myservoR.write(3);; // рука клешни опускаем
delay(2000); /* ждем 2 секунды, */
myservoZ.write(116);; // Клешня сжимаем
delay(1000); /* ждем 1 секунду, */
myservoR.write(170);; // рука клешни поднимаем
delay(600); /* ждем */
myservoZ.write(45);; // Клешня разжимаем
}
//--------— Повороты серв при нажатии кнопок —-------------
if(btca2aLite.Button(KEYCODE_BUTTON_X)) // поворот водомета вниз
{
moveServoVDown = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_A)) // поворот водомета направо
{
moveServoHRight = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_B)) // поворот водомета вверх
{
moveServoVUp = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_Y)) // поворот водомета налево
{
moveServoHLeft = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_R1)) // зхахват сжать
{
moveServoZLeft = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_R2)) // захват разжать
{
moveServoZRight = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_L1)) // рука клешни вниз
{
moveServoRLeft = true;
}
if(btca2aLite.Button(KEYCODE_BUTTON_L2)) // рука клешни вверх
{
moveServoRRight = true;
}
//--------— чтобы сервы не продолжали движения при отжатых кнопках —-------------
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_X))
{
moveServoVDown = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_B))
{
moveServoVUp = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_A))
{
moveServoHRight = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_Y))
{
moveServoHLeft = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_R2))
{
moveServoZRight = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_R1))
{
moveServoZLeft = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_L2))
{
moveServoRRight = false;
}
if(btca2aLite.ButtonReleased(KEYCODE_BUTTON_L1))
{
moveServoRLeft = false;
}
//----------------— Стоп —---------------------
// Если не нажата ни одна кнопка курсора происходит остановка, скорость 0 для каждого мотора
if (btca2aLite.ButtonReleased(KEYCODE_DPAD_UP) && btca2aLite.ButtonReleased(KEYCODE_DPAD_DOWN) && btca2aLite.ButtonReleased(KEYCODE_DPAD_LEFT) && btca2aLite.ButtonReleased(KEYCODE_DPAD_RIGHT)){
analogWrite (Pwm_L, 0);
analogWrite (Pwm_R, 0);
}
}
//Функция управления сервоприводами (вызывается в теле loop на каждой итерации)
//Выполняет изменения положения серв на подобранный шаг согласно установленным флагам движения
//Флаги устанавливаются согласно поступившим символам управления сервами
void performServo()
{
//Установлен флаг движения вверх и текущий угол не максимальный
if (moveServoVUp && curVAngle + V_STEP <= V_U_ANGLE)
{
//К текущему верт. углу прибавляем шаг
curVAngle += V_STEP;
}
//Установлен флаг движения вниз и текущий угол не минимален
else if (moveServoVDown && curVAngle - V_STEP >= V_D_ANGLE)
{
//От текущего верт. угла отнимаем шаг
curVAngle -= V_STEP;
}
//Установлен флаг движения влево и текущий угол не максимален
if (moveServoHLeft && curHAngle + H_STEP <= H_L_ANGLE)
{
//К текущему гор. углу прибавляем гор. шаг
curHAngle += H_STEP;
}
//Установлен флаг движения вправо и текущий угол не минимален
else if (moveServoHRight && curHAngle - H_STEP >= H_R_ANGLE)
{
//От текущего угла отнимаем гор. шаг
curHAngle -= H_STEP;
}
//Установлен
if (moveServoZLeft && curZAngle + Z_STEP <= Z_L_ANGLE)
{
//К текущему гор. углу прибавляем гор. шаг
curZAngle += Z_STEP;
}
//Установлен флаг движения вправо и текущий угол не минимален
else if (moveServoZRight && curZAngle - Z_STEP >= Z_R_ANGLE)
{
//От текущего угла отнимаем гор. шаг
curZAngle -= Z_STEP;
}
//Установлен
if (moveServoRLeft && curRAngle + R_STEP <= R_L_ANGLE)
{
//К текущему гор. углу прибавляем гор. шаг
curRAngle += R_STEP;
}
//Установлен флаг движения вправо и текущий угол не минимален
else if (moveServoRRight && curRAngle - R_STEP >= R_R_ANGLE)
{
//От текущего угла отнимаем гор. шаг
curRAngle -= R_STEP;
}
//Если было движние по вертикали
if (moveServoVUp || moveServoVDown)
{
myservoV.write(curVAngle);
}
//Если было движение по горизонтали
if (moveServoHLeft || moveServoHRight)
{
myservoH.write(curHAngle);
}
if (moveServoZLeft || moveServoZRight)
{
myservoZ.write(curZAngle);
}
if (moveServoRLeft || moveServoRRight)
{
myservoR.write(curRAngle);
}
}
новое видео:
временно снял водомет, и установил пушку, стреляет 6мм шариками
и прикрутил приехавшую из Китая пушку…
правда это была не совсем пушка, а механизм стрельбы 6мм шариками от модельных танком Henlong, чтобы не покупать целый танк за 3000-5000 я купил запасть за 550руб.
почему я не купил гирбокс от страйкбола?
на то 2 причины:
1. сильно мощное, может кого то покалечить..
2. цена в 10 раз выше 🙂
есть недостаток у этого механизма — низкая скорострельность, на видео особенно низкая т.к питаю от 3х в, хотя можно 6 — 9
http://images.sevstar.net/viewer.php?file=59094243184497828873.jpg
http://images.sevstar.net/viewer.php?file=87142517578332600977.jpg
http://images.sevstar.net/viewer.php?file=68702878424694602806.jpg
http://images.sevstar.net/viewer.php?file=61506990518273702824.jpg
http://images.sevstar.net/viewer.php?file=67439761693001393174.jpg
ствол и уплотнительная резинка в комплект механизма не входят!
поэтому чтобы стрелять пришлось купить детский пистолет и позаимствовать у него ствол и резинку.
http://images.sevstar.net/viewer.php?file=15374563575590298148.jpg
на фото нет новых доработок, добавил лазерный прицел и дымогенератор с подсветкой для пущего эффекта…
0 комментариев на «“Фиксиход — тележка с манипулятором и водометом”»
Классная платформа, а водомет лучше поставить от ваз 2108-2115 с бачка омывателя ветрового стекла цена примерно 100-150 р. зато производительность гораздо лучше, тогда будет водяная пушка а не брызгалка 😉
спасибо за свовет, возможно так и сделаю, а пока снял водомет, поставил пушку, а потом и пушку снял и отлаживаю подключение к джойстику
http://www.youtube.com/watch?v=M3YJXgwfJlw

в перспективе установка пушки и водомета, и клешня само собой 🙂