
 По мере погружения в мир электроники, на моем столе появился приличный ворох различных блоков питания: на 3.3V, 5V, 9V, 12V и т.п. Причем некоторых несколько штук — на разные мощности. Уверен, что у многих примерно такая же ситуация на рабочем месте. И вполне естественно, что в какой-то момент времени приходишь к мысли: а нельзя ли как-то упростить себе жизнь хотя бы в этом вопросе? Да, скажете вы, для этих целей давным давно существуют лабораторные блоки питания. На разные кошельки, вкус, цвет и даже «в горошинку»… Правда и стоят они достаточно неплохо. Поэтому чаще всего начинающие радиолюбители решают этот вопрос самостоятельным изготовлением регулируемого блока питания. Наиболее популярным вариантом является регулируемый блок питания на LM317. Прямо так, слово в слово (или «adjustable power supply lm317»), и забивайте в Google. Получите ОГРОМНЕЙШЕЕ число ссылок!!!
По мере погружения в мир электроники, на моем столе появился приличный ворох различных блоков питания: на 3.3V, 5V, 9V, 12V и т.п. Причем некоторых несколько штук — на разные мощности. Уверен, что у многих примерно такая же ситуация на рабочем месте. И вполне естественно, что в какой-то момент времени приходишь к мысли: а нельзя ли как-то упростить себе жизнь хотя бы в этом вопросе? Да, скажете вы, для этих целей давным давно существуют лабораторные блоки питания. На разные кошельки, вкус, цвет и даже «в горошинку»… Правда и стоят они достаточно неплохо. Поэтому чаще всего начинающие радиолюбители решают этот вопрос самостоятельным изготовлением регулируемого блока питания. Наиболее популярным вариантом является регулируемый блок питания на LM317. Прямо так, слово в слово (или «adjustable power supply lm317»), и забивайте в Google. Получите ОГРОМНЕЙШЕЕ число ссылок!!!
И братья китайцы не остались в стороне от вопроса и вовсю предлагают «за недорого» набор для самостоятельной сборки (по буржуйски DIY kit) такого блока питания. Например тут.

Каюсь, но я тоже не устоял и заказал себе такой набор. Уж больно он симпатично смотрелся в прозрачном корпусе… Однако, не с моим везением. Самая важная для меня часть — а это именно корпус из оргстекла, при транспортировке оказалась поломана. Вот же, китаец, не мог нормально упаковать хрупкую вещь! После небольшой с ним переписки, маленький житель поднебесной выслал мне новый корпус. Теперь терпеливо жду.
 А да, возможно еще один веский аргумент «ЗА» покупку этого набора. Я попытался заказать лазерную резку поврежденных элементов корпуса у себя в городе, но мне ее предварительно оценили (я озвучил примерные размеры деталей по телефону) в 15 условных единиц!!! Точнее даже от 15 у.е. и выше!! И это при общей стоимости набора у китайцев в 10 USD.
А да, возможно еще один веский аргумент «ЗА» покупку этого набора. Я попытался заказать лазерную резку поврежденных элементов корпуса у себя в городе, но мне ее предварительно оценили (я озвучил примерные размеры деталей по телефону) в 15 условных единиц!!! Точнее даже от 15 у.е. и выше!! И это при общей стоимости набора у китайцев в 10 USD.
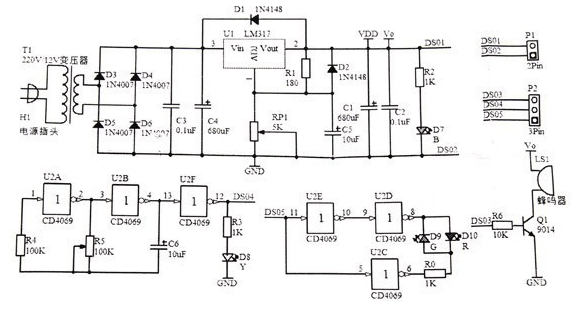
Кстати, к набору прилагалась бумажная оригинальная схема этого блока питания:
Полученный набор я спаял и собрал в корпус буквально за час. Тестовые испытания принесли еще одно разочарование. Помимо поврежденного корпуса (который я пока склеил дихлорэтаном), сам блок питания — оказался, так скажем,«не совсем мощным». При попытке выжать из него хотя бы 0.2 Ампера на 12 вольтах, выходное напряжение очень здОрово начинало «просаживаться». Признаться, нечто подобное я и ожидал. Следует отметить наличие в конструкторе интересных «свистопердпыхтелок»: генератор прямоугольных импульсов (с регулировкой частоты), логический пробник и некое подобие «прозвонки». Вроде как неплохая «фигулина» для всяких отладок, если бы чуть помощнее сам блок питания, хотя бы 0.5 ампера.
А чего нам терять? Попробуем модернизировать эту коробочку.
 Итак, я решил подвергнуть доработке два важных компонента: трансформатор и стабилизатор. Вначале были попытки подобрать более мощный трансформатор, но идея потерпела фиаско: или мощность оказывалась примерно такой же как и в штатном, или размер никак не подходил по габаритам корпуса.
Итак, я решил подвергнуть доработке два важных компонента: трансформатор и стабилизатор. Вначале были попытки подобрать более мощный трансформатор, но идея потерпела фиаско: или мощность оказывалась примерно такой же как и в штатном, или размер никак не подходил по габаритам корпуса.
А вообще, зачем мне трансформатор? Почему бы его не заменить на малогабаритный импульсный блок питания? Полазив в своих закромах, я нашел какой-то блок питания (даже не знаю от чего, может от какого-то роутера…) на котором гордо красовалась надпись 12 вольт, 1.3 Ампера, 15 Ватт. Очень неплохо и похоже на честную маркировку (12В *1.3А= 15.6 Ватт). Расколов пластиковый корпус, я извлек плату (с удовлетворением хочу отметить весьма неплохую схему с ШИМ-контроллером и вполне сносное качество пайки) и примерился к корпусу блока питания.
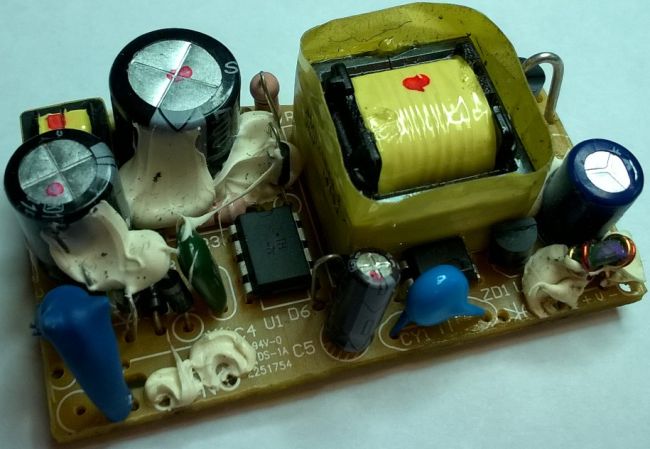
Все очень даже влазит. Буквально чуть-чуть пришлось поработать напильником. Жаль, что максимально выдаваемое напряжение моей платы — 12 вольт. Ладно, попробуем исправить. Посмотрев пару роликов на ютубе, пришел к выводу, что моя плата — классическая схема импульсного БП, с регулировкой частоты ШИМ с помощью управляемого стабилитрона TL431.
 Напомню, что проделанные мной «манипуляции» относятся ИМЕННО к имеющемуся у меня блоку питания!!! Будьте внимательны!!!
Напомню, что проделанные мной «манипуляции» относятся ИМЕННО к имеющемуся у меня блоку питания!!! Будьте внимательны!!!
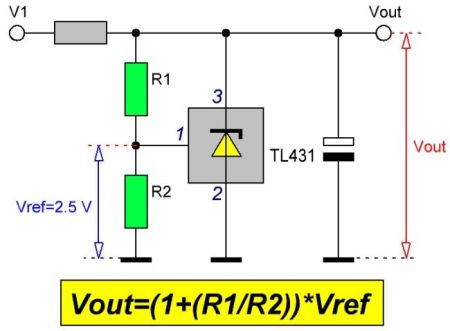
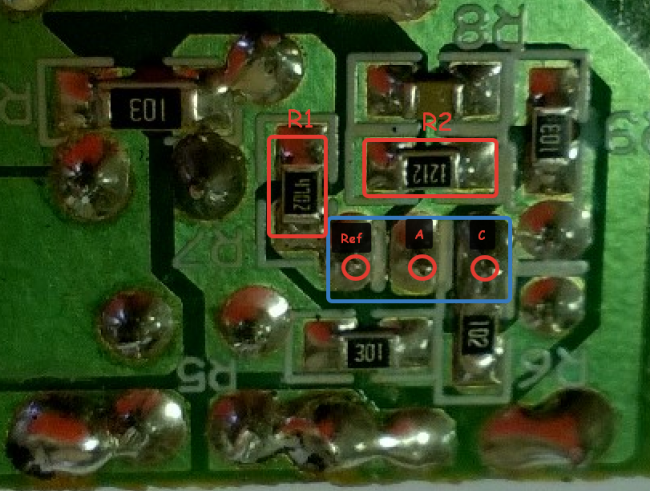
В моем варианте платы, TL431 — это внешне похожий на транзистор, трехногий элемент, расположенный возле трансформатора справа внизу. Что же это за «зверек»? Микросхема TL431 — это регулируемый стабилитрон. Используется в роли источника опорного напряжения в схемах различных блоков питания. Типовая схема включения:
Чтобы удостовериться, что я все правильно понял, проверим расчеты. На «свежедобытой» плате (для 12 вольт) были установлены следующие номиналы резисторов в делителе: R1=4702 (высокоточный 47кОм) и R2=1212 (высокоточный 1.21 кОм).
Считаем: (1+(47000/12100))*2.5=12.2 Вольта. Очень правдоподобно. Я же хочу на выходе получать порядка 16 вольт (бОльшее напряжение, лично мне, не разу не понадобилось). Обратным счетом получается, что мне для этого нужно установить такие номиналы: R1=56 кОм и R2=10 кОм. (я воспользовался вот этим он-лайн калькулятором).
 И еще ОЧЕНЬ важно! Думаю, что значительное изменение выходного напряжения (скажем, с 12 вольт на 3.3, или на 25 вольт) — ничего хорошего не сулит. И еще важный момент: установленные на выходе электролиты были расчитаны на рабочее напряжение в 16 Вольт и я заменил их на аналогичные по емкости, но с бОльшим рабочим напряжением (25 Вольт). Тоже учитывайте этот момент.
И еще ОЧЕНЬ важно! Думаю, что значительное изменение выходного напряжения (скажем, с 12 вольт на 3.3, или на 25 вольт) — ничего хорошего не сулит. И еще важный момент: установленные на выходе электролиты были расчитаны на рабочее напряжение в 16 Вольт и я заменил их на аналогичные по емкости, но с бОльшим рабочим напряжением (25 Вольт). Тоже учитывайте этот момент.
Итак, запаиваю новые резисторы и конденсаторы — Вау… На выходе получаю напряжение около 16 вольт. Все так, как задумано! А что же с мощностью? Думаю, что мощность осталась та же 🙁 Чудес не бывает. Т.е., примерно 15 Ватт (плюс-минус лапоть). А это значит, что при таком напряжении, выдаваемый ток получится не более чем: (15Ватт/16вольт) = 0.9 Ампера. Проверка на светодиодной ленте показала стабильную работу переделанного блока с выходным током 0.8 Ампера. Для большинства моих поделок и испытаний — «ВЫШЕ КРЫШИ».
 Но, как говорят французы: аппетит приходит во время еды. А на кой мне ВООБЩЕ линейный стабилизатор (LM317)? Нет, это конечно очень классная штука, но у него достаточно низкий КПД и излишек энергии он «тупо» рассеивает в виде тепла. При понижении напряжения с 16 вольт до 5, входные 16 вольт распределяются между стабилизатором и нагрузкой в отношении «11 вольт на стабилизаторе + 5 вольт на нагрузке». При токе в 0.2А на нагрузке выделяется 1 ватт, а на LM317 — целых 2.2 ватта. Получается что «лишние» 11 вольт просто гасятся на стабилизаторе, превращаясь в тепло. Во-первых, из-за этого возникают проблемы с охлаждением, а во-вторых на это уходит много энергии из источника питания. Конечно, при использовании штатного «мили-пили» трансформатора нагрев стабилизатора не большая проблема, так как ток незначительный. А вот после замены трансформатора на более мощный источник — это становится весьма критично. Короче говоря, воспользуемся современными технологиями.
Но, как говорят французы: аппетит приходит во время еды. А на кой мне ВООБЩЕ линейный стабилизатор (LM317)? Нет, это конечно очень классная штука, но у него достаточно низкий КПД и излишек энергии он «тупо» рассеивает в виде тепла. При понижении напряжения с 16 вольт до 5, входные 16 вольт распределяются между стабилизатором и нагрузкой в отношении «11 вольт на стабилизаторе + 5 вольт на нагрузке». При токе в 0.2А на нагрузке выделяется 1 ватт, а на LM317 — целых 2.2 ватта. Получается что «лишние» 11 вольт просто гасятся на стабилизаторе, превращаясь в тепло. Во-первых, из-за этого возникают проблемы с охлаждением, а во-вторых на это уходит много энергии из источника питания. Конечно, при использовании штатного «мили-пили» трансформатора нагрев стабилизатора не большая проблема, так как ток незначительный. А вот после замены трансформатора на более мощный источник — это становится весьма критично. Короче говоря, воспользуемся современными технологиями.
Итак, вторым шагом поменяем LM317 на DC-DC преобразователь на базе LM2596.
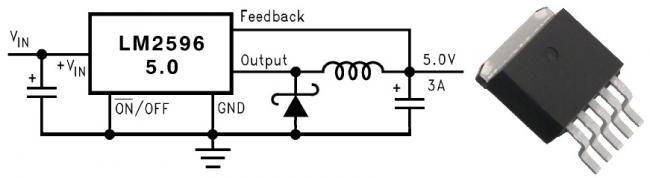
Характеристики микросхемы:
— Входное напряжение — от 2.4 до 40 вольт
— Выходное напряжение — фиксированное либо регулируемое (от 1.2 до 37 вольт)
— Выходной ток — до 3 ампер (при хорошем охлаждении — до 4.5А)
— Частота преобразования — 150кГц
— КПД — 70-75% на низких напряжениях, до 95% на высоких
 Указанная микросхема существует как в варианте на фиксированные напряжения, так и на регулируемое с помощью внешних резисторов. Обращаю ваше внимание, что я использовал в данном проекте именно регулируемую версию микросхемы, с маркировкой ADJ. У меня уже был достаточно большой опыт с этим вариантом преобразователя. (Кстати, раньше я использовал преобразователь LM2576 — практически полный аналог LM2596, но с другой рабочей частотой.)
Указанная микросхема существует как в варианте на фиксированные напряжения, так и на регулируемое с помощью внешних резисторов. Обращаю ваше внимание, что я использовал в данном проекте именно регулируемую версию микросхемы, с маркировкой ADJ. У меня уже был достаточно большой опыт с этим вариантом преобразователя. (Кстати, раньше я использовал преобразователь LM2576 — практически полный аналог LM2596, но с другой рабочей частотой.)
Итак, новая схема (с сохранением функционала всяких «полезных фич») теперь стала такой:
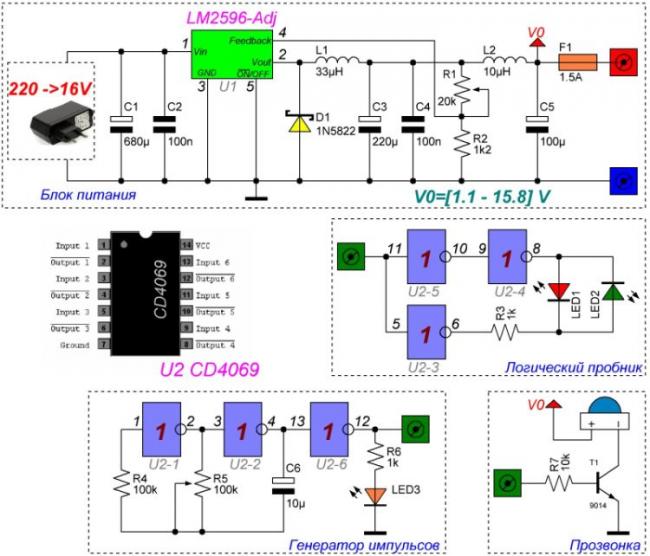
Как вы могли заметить, «обвязка» LM2596 не намного сложнее, чем для LM317. Изменения в схеме коснулись только силовой части. А так же синий светодиод на выходе после стабилизатора (в исходном варианте схемы) — мне показался избыточным (ведь работоспособность можно оценить по индикатору напряжения). Дополнительно (на всякий пожарный случай) после стабилизатора установлены дроссель L2 и конденсатор C5 — Ripple filter (что-то типа, подавителя помех) и предохранитель на 1.5А (выпаял со старой материнской платы). Итак, теперь немного модернизируем плату нашего блока питания под этот вариант схемы. Важно соблюсти не только размер платы, но и положение некоторых элементов: посадочные и регулировочные отверстия, положение клемников, место установки переменного резистора.
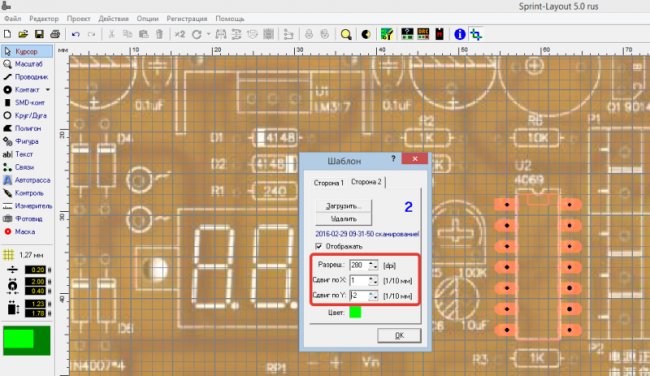
Итак, как же это я сделал? Я отсканировал еще не распаянную плату на сканере. Сохранил полученную картинку в формате BMP.
Теперь в SprintLayout-е открываем [ОПЦИИ] -> [ШАБЛОН] -> [ЗАГРУЗИТЬ] и выбираем сохраненный ранее скан.
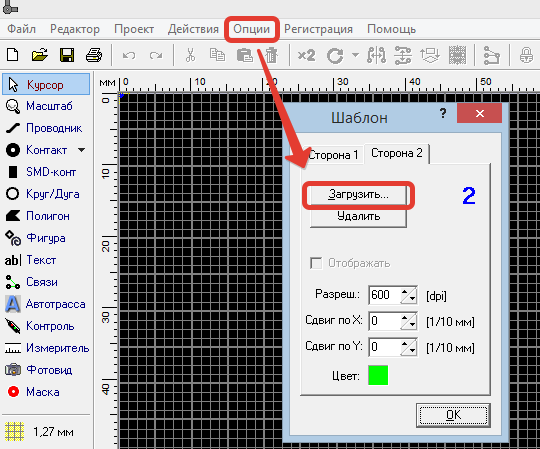
Теперь важно подобрать РАЗРЕШЕНИЕ и сдвиг по осям. Я расположил на картинке (чтобы можно было как-то ориентироваться) корпус микросхемы DIP14 и менял параметры шаблона, пока не получил идеальное соответствие картинки-шаблона реальным размерам радиодетали.
Все. Расположив ключевые элементы в нужных местах, мне осталось только развести дорожки под новую схему.Вот как в итоге получилось:
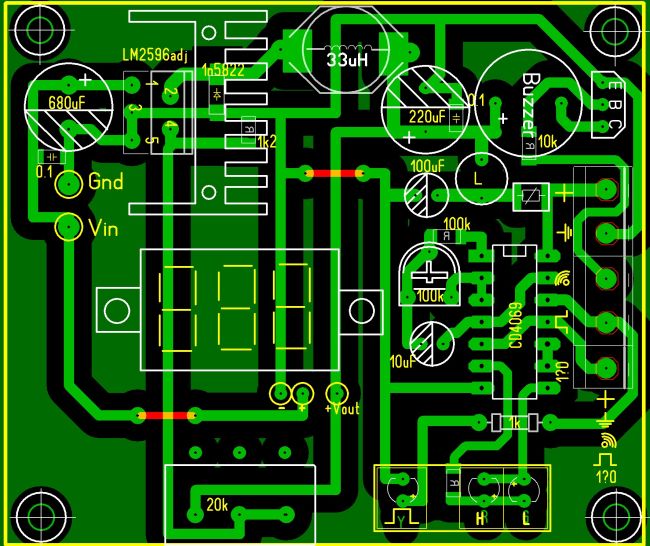
Обратите внимание, на подключение сегментного индикатора напряжения. Он запитывается ДО стабилизатора, а замеряет — ПОСЛЕ. Делается это для того, чтобы при установке минимального выходного напряжения он продолжал бы работать. Ну, что? Поехали по традиционной дорожке: ЛУТим-Сверлим-Травим-Паяем….
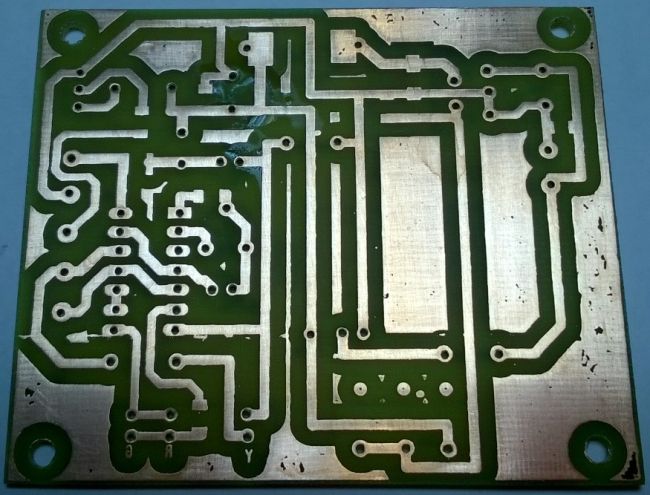
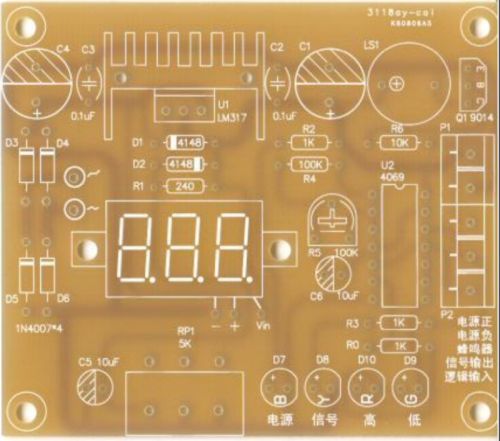
Лицевая сторона:
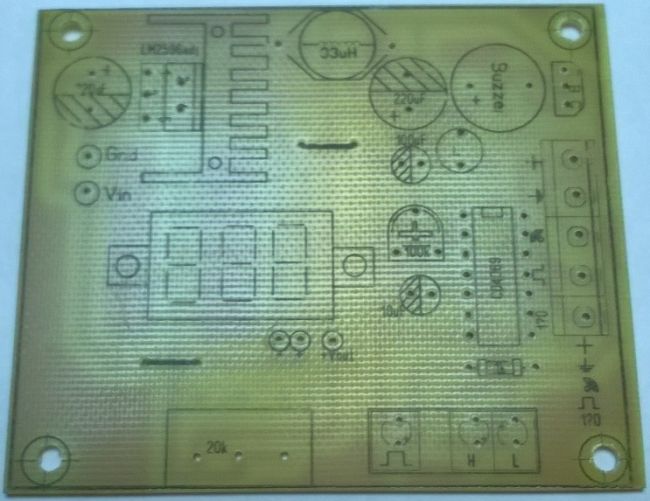
И вот у нас в руках готовая альтернативная плата. Размещаем в корпус. Как ни странно, но все подошло идеально. Как говорят, найди 10 отличий 🙂

Вот такая мигающая и светящаяся коробочка теперь живет на моем столе и весьма неплохо справляется с возложенными на нее задачами.
Надеюсь, найдутся люди, которые захотят повторить мою модернизацию. Все нужные для этого материалы забираем тут.