

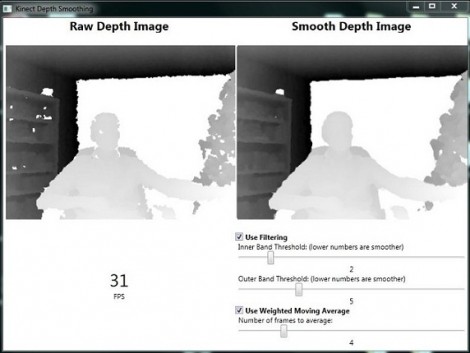
Karl Sanford использовал для сглаживание карты глубины от сенсора Kinect, два подхода: пиксельную фильтрацию(pixel filtering) и взвешенное скользящее среднее(weighted moving average).
Демонстрационное видео:
Используется взвешенное среднее соседних кадров, чтобы уменьшить количество шумов (мерцающих областей).
Для разработки использовался Kinect Beta 2 SDK
Ссылки
Smoothing Kinect Depth Frames in Real-Time
По теме
Юбилей Kinect-а
Kinect — начало работы — настройка OpenCV