

Microsoft выпустила для игровой приставки Xbox игровой контроллер — Kinect.
Kinect — это игровой контроллер для Xbox 360, разработаный фирмой Microsoft.
В основе проекта Kinect (старое название — ранее Natal), лежит камера Zcam, разработанная фирмой 3DV Systems в 2000-м году( разновидность времяпролетной камеры, позволяющей получать трехмерную видеоинформацию).
Kinect позволяет пользователю взаимодействовать с Xbox через устные команды, позы тела и показываемые объекты или рисунки.
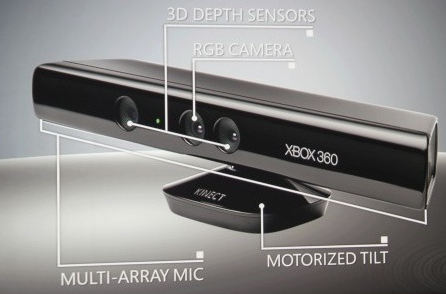
Kinect cостоит из двух сенсоров глубины, цветной видеокамеры и микрофонной решетки. Датчик глубины состоит из инфракрасного проектора объединенного с монохромной КМОП-матрицей, что позволяет Kinect получать трёхмерное изображение при любом естественном освещении.
по информации openkinect.org/wiki/Hardware_info используются 3 камеры:
1. цветная MT9M112, разрешение 1280×1024, 15 кадров в секунду (30 кадров при 640×512);
2. цветная MT9v112, разрешение 640×480, 30 кадров в секунду;
3. ИК сенсор глубины MT9M001, инфракрасный чернобелый 1280×1024, 30 кадров в секунду.

ключевая проблема Kinect — необходимость пространства ( игрок должен располагаться на расстоянии 2-2.5 метра от устройства (не ближе 1.8 метра, но и не дальше 3 метров)
Разумеется, такой замечательный девайс, как Kinect не мог не обратить на себя внимание различных самоделкиных. И через неделю после начала продаж протокол контроллера был взломан.
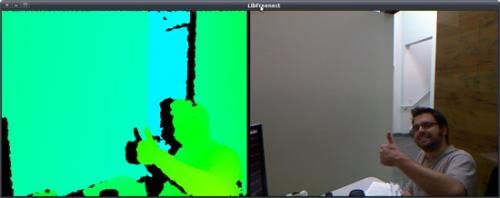
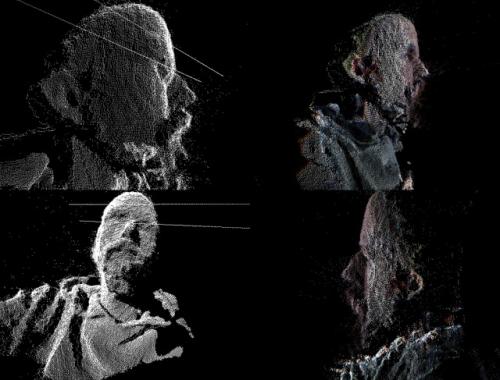
Уже работает сайт openkinect.org и теперь Kinect можно попробовать использовать для различных инстралляций и забав, камеры системы технического зрения или в качестве продвинутого сенсора робота.
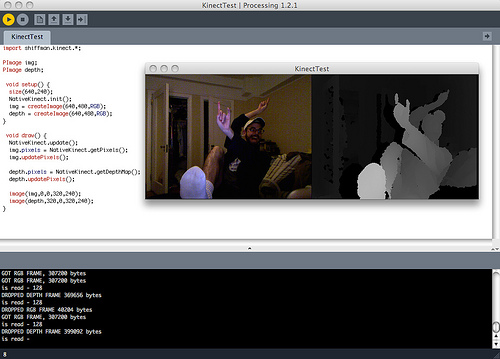
Уже созданы библиотека для работы с Kinect под Processing-ом и плагин для openFrameworks — ofxKinect, который работает в связке с OpenCV
Его уже можно наблюдать на iRobot и PR2.

Что тут сказать — сенсор очень и очень интересный!
К сожалению, не очень радует цена этого девайса. В США он продаётся по цене 149$ (упоминается, что Microsoft продаёт его по убыточной цене, надеясь отбить деньги на программном обеспечении), в Европе он стоит 149 Евро, а в России он стоит уже порядка 8000 рублей О_о
читать ещё:
внутренности Kinect
Kinect: принцип работы и ПО
Ссылки
http://www.xbox.com/en-US/kinect
http://ru.wikipedia.org/wiki/Kinect
обзор Microsoft Kinect
http://openkinect.org
Kinect – OpenSource
Kinect – One Week Later
Kinect drivers for ROS coming together
http://www.libusb.org
руководство по подключению Kinect к iRobot Create/Roomba
Делаем адаптер питания Kinect из подручных средств
Подробности о прорывном ИИ в Kinect