
Michael Rubenstein (один из создателей роевых микророботов Kilobot) и другие исследователи из Northwestern University (Эвансон, США) разработали способ децентрализованного управления роем из 100 роботов, что позволяет им совместно формировать различные фигуры.
Кажется, что для решения подобной задачи, можно просто передать роботам форму объекта, которую требуется сформировать, каждый робот выберет своё целевое местоположение, где он окажется частью фигуры, а потом спланирует свой путь, куда он должен проследовать (пусть даже следуя сетевому шаблону, что упрощает ситуацию).
Но подобный подход не учитывает, следующие проблемы:
1. так как централизованное управление отсутствует, то можно получить ситуацию, когда одну и ту же цель выберут сразу несколько роботов;
2. при таком количестве роботов — робот не сумеет спланировать свой путь до цели так, чтобы не столкнуться с другими роботами.
Для решения этих проблем, роботы во время движения общаются друг с другом, что позволяет им не только избегать столкновения друг с другом, но и получать информацию о том, куда едут его «коллеги» и стоит ли им поменяться местами назначения. Так как роботы ничем не отличаются, то не имеет значения кто из них окажется в нужной позиции, если все требуемые целевые позиции будут заполнены. Таким образом, когда один робот «разговаривает» с другим роботом — они могут определить как обменяться между собой целями, чтобы в результате им обоим пришлось меньше двигаться.
Подобный распределённый алгоритм гарантирует, что все целевые позиции будут заполнены и помогает роботам избегать столкновений друг с другом, используя команду «ожидания».
Для тестирования данного алгоритма коллективного взаимодействия, исследователи разработали нового робота — Coachbot V2.0. Он намного больше по размерам (высота 12 см, диаметр 10 см), чем Kilobot, но более функциональный и расширяемый.
Робот передвигается используя стандартую двухколёсную схему, что даёт ему гораздо лучшие возможностями передвижения по сравнению с роботом Kilobot, который перемещается при помощи вибромоторов. Использование системы локализации (на базе HTC Vive) позволяет определять абсолютное положение робота, что серьёзно облегчает работу с роботами: чтобы проводить эксперименты с роботами Kilobot — их нужно размещать в исходное положение вручную (при большом количестве роботов это занимает часы), а новым роботам можно указать их начальные позиции и они сами смогут на них переместиться.
Coachbot позволяют отслеживать состояние всех роботов, что облегчает понимание состояния роя.
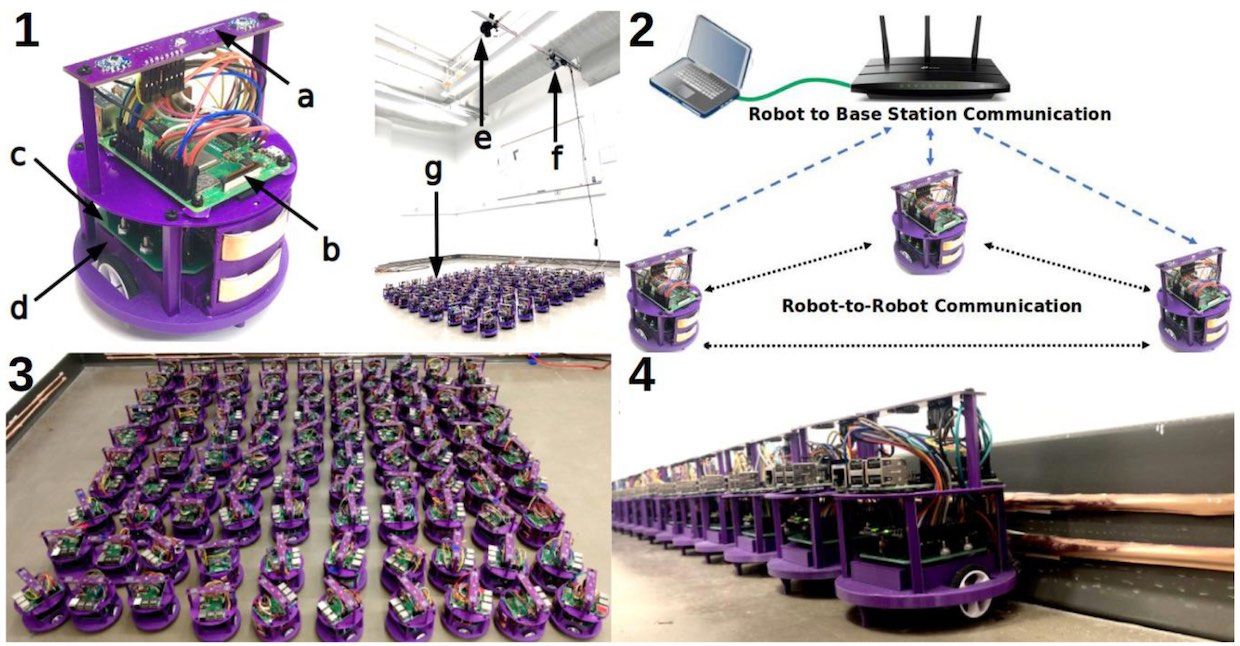
Аппаратная часть экспериментов: 1. Мобильный робот Coachbot V2.0 — оснащён системой локализации на основе HTC Vive (a), одноплатный компьютер Raspberry Pi b + (b), плата электроники (c), аккумулятор (d). Арена, используемая в экспериментах: подвесная камера, используемая только для записи видео (e), подвесная базовая станциея HTC Vive (f). Эксперименты проводилсь с роем из 100 роботов (g). 2. Сеть связи Coachbot V2.0 Swarm состоит из соединения Ethernet между базовой станцией и маршрутизатором Wi-Fi (зеленая линия), соединений TCP/IP (синие линии) и широковещательных соединений уровня 2 (чёрные линии). 3. Рой из 100 роботов. 4. Роботы заряжают свои батареи, соединяясь с двумя металлическими полосками, прикреплёнными к стене.
На видео работы системы видно, что роботы двигаются по траекториям манхэттенского типа (Manhattan distance), а не по прямолинейным путям, так как подобный тип перемещения по дискретной сетке делает алгоритм робота менее вычислительно сложным, и позволяет проще контролировать столкновения и взаимоблокировки роботов.
Алгоритм управления не назначает местоположения целей роботам, они должны самостоятельно выяснить — куда роботу следут двигаться. На видео видно, что последние несколько роботов оказались далеко от своих целей, но вместо того, чтобы обходить других роботов и двигаться к цели вокруг всей фигуры — они определилсь каким роботам нужно сместиться, чтобы освободить место, которое ближе к текущему положению робота.
Кроме тестирования на арене, исследователи провели симуляцию взаимодействия 1 тысячи роботов и управляющий алгоритм не утратил своей эффективности.
Исследователи надеются, что подобный алгоритм формирования формы сможет позволить разрабатывать самонастраиваемые системы, которые будут автоматически изменять свою форму простым и надёжным способом. Например, для складских роботов, которым нужно перемещаться по назначенным целям, чтобы собирать предметы.
Ссылки
Shape Formation in Homogeneous Swarms Using Local Task Swapping
Swarm of Robots Forms Complex Shapes Without Centralized Control
По теме
Создание самоорганизованных структур роем из 300 роботов
Kilobot — роевые микророботы
Более 1000 роевых микророботов научили выстраивать сложные фигуры
BristleSwarm — коллективные виброботы на Arduino
Cамоорганизация роботов без алгоритмов
supersmarticle — необычный подход к роевой робототехнике