
http://www.youtube.com/watch?v=Jj3yVf7ZUcI
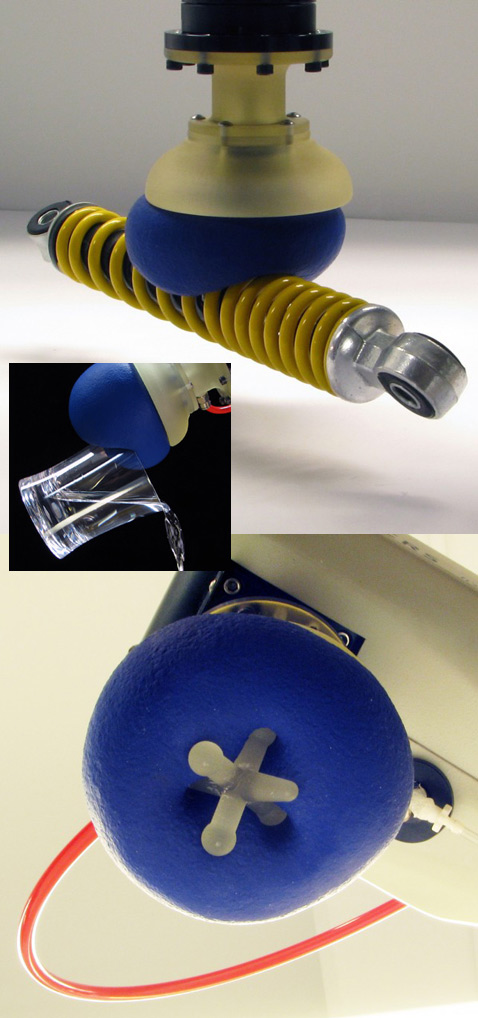
Ключевая деталь универсального робототехнического захвата (universal robotic gripper) – шарик из латекса, наполненный молотым кофе.
Для захвата предмета, робот опускает на него шарик. При этом, поверхность шарика деформируется и как бы обнимает выступы предмета. Затем из шарика откачивается воздух, частицы кофе сцепляются между собой и превращают захват в твёрдое тело.
Ссылки
инструкция по изготовлению — DIY Universal Robot Gripper
По теме
Адаптивный захват FESTO FinGripper
Festo ExoHand
Простой захват для робота
Гибкий захват по образу языка хамелеона
Попкорн, как движущая сила механизмов
0 комментариев на «“Универсальный захват для роботов”»
Захват, строго говоря, не совсем универсальный — не всё можно так схватить, не поломав, да и быстродействие невелико. Зато оригинально (:
Как раз таки универсальность на высоте, интереен именно этим, ну и оригинальностью, но мощьность явно не очень. Только для относительно легкиих по весу предметов. К тому-же пневматика крайне не надежна. Может стоит подумать о использовании гидравлики с эфирными наполнителями?
не могу поверить что никто еще не повторял. может заморочиться?