
Содержание:
1. Введение. Исходные данные. Требования. Выбор типа датчика.
2. Выбор компонентов. Разработка конструкции энкодера.
3. Разработка алгоритма
4. Тестирование
4. Тестирование
Программа выводит некоторые данные о системе позиционирования. Результаты тестирования приведены в таблице 5.1.
Таблица 5.1.
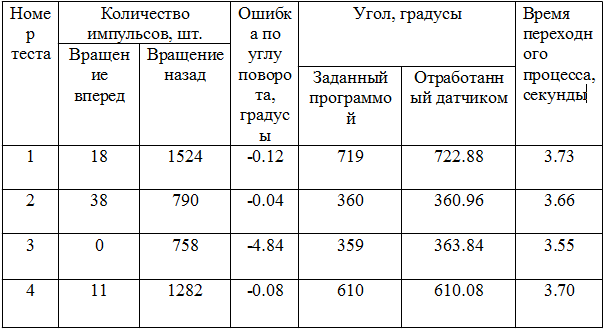
По результатам теста можно сказать, что при правильной настройке ПИД — регулятора можно добиться требуемой точности. Отрицательная ошибка говорит о том, что процесс с перерегулированием. Время переходного процесса говорит о том, что в системе есть колебания. Так же этому свидетельствует наличие зарегистрированных импульсов при условном положительном направлении вращения.
Большая ошибка в тесте номер 3 возникла в связи с провалом мощности двигателя при перерегулировании. Двигатели постоянного тока требуют больших пусковых токов. Для устранения такой ошибки, требуется настроить фильтр мощности или улучшить ПИД – регулятор.
В целом система удовлетворяет требованиям.
Доcтоинства и недостатки:

Как видно из рисунка выше, чтобы демонтировать якорь двигателя, придется снять магниты. На первый взгляд кажется что сильно неудобно, но двигатель разбирать приходится очень редко, в основном чтобы смазать. Все узлы доступны для смазки, как редуктор, так и подшипники (на другом конце вала якоря).
В целом энкодер получился очень дешевым, всего 120руб. Как мне показалось, основная сложность — работа с мелкими деталями 🙂