
Содержание:
1. Введение. Исходные данные. Требования. Выбор типа датчика.
2. Выбор компонентов. Разработка конструкции энкодера.
3. Разработка алгоритма
4. Тестирование
1. Введение. Исходные данные. Требования. Выбор типа датчика.
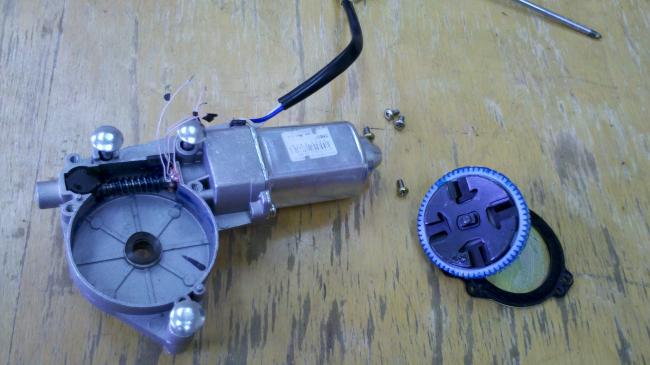
В данной статье описывается разработка встраиваемого энкодера для популярного среди мобильной робототехники моторедуктрора стеклоподъемника. Энкодер используется в мобильной платформе, поэтому разрабатывался в соответствии с исходными данными и техническими требованиями.
Стоимость одного энкодера (датчики Холла + магниты) составила 120руб.
Макет углового преобразователя собран и протестирован.
Моторедуктор стеклоподъемника:
1.1 ВВЕДЕНИЕ
Для позиционирования исполнительных органов робота, необходимо снабдить управляющие механизмы информационными устройствами. Определение угловых и линейных перемещений является основной задачей сенсорной системы.
Энкодер / преобразователь угловых перемещений — устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота.
Статью включает в себя:
Выбор типа датчика.
Необходимо рассмотреть воздействие окружающей среды на датчик, помехоустойчивость, а так же влияния конкретных физических явлений. Выбор типа датчика должен быть обоснованным.
Выбор электротехнических компонентов
После выбора типа датчика и соответствующего ему физического явления, необходимо из соображений точности, показателей цикличности, частоты обновления, надежности, экономичности, габаритов, а так же других схемотехнических характеристик, таких как уровень выходного напряжения, питания схемы, осуществить выбор наиболее предпочтительных элементов.
Разработка конструкции энкодера
Конструкция энкодера должна занимать как можно меньше, в связи со встраиванием ее непосредственно внутрь двигателя. Этот пункт рекомендуется выполнять с уточнением 2 пункта.
Разработка алгоритма
Алгоритм опроса датчика должен затрачивать как можно меньшее количество времени процессора, так как предполагается использование его ресурсов в еще других операциях.
Тестирование
Перед тестированием макета должны быть проверены все контрольные информационные узлы. После окончания тестирования, должны быть сделаны соответствующие выводы о работоспособности и пригодности системы.
1.2. ИСХОДНЫЕ ДАННЫЕ
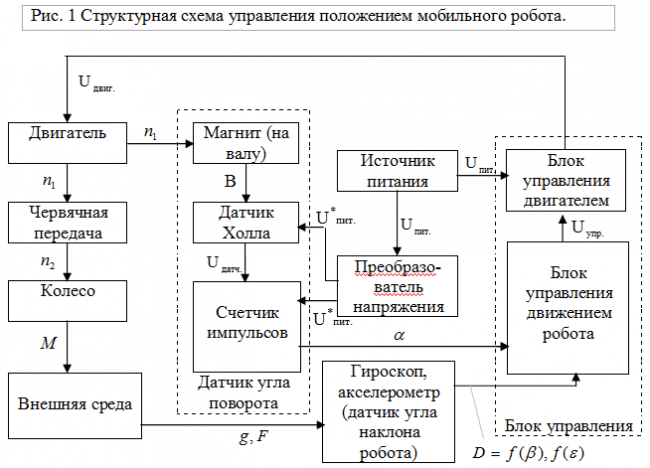
Управляющим механизмом позиционирования мобильного робота является привод, включающий в себя двигатель постоянного тока, редуктор, блок управления двигателем, источник питания, датчик угла поворота.
1.3. ТРЕБОВАНИЯ
1. По точность на выходном валу 0.6 градусов
2. По направлению вращения 2 направления
3. По габаритам (расположение внутри двигателя)
4. По скорости опроса (не больше 0.001сек)
1.4. Выбор типа датчика
Основными элементами для позиционирования мобильного робота является приводы. Для управления приводами робота необходимы датчики угловых перемещений.
Расположение энкодера предполагается внутри двигателя. Поэтому выбор типа датчика будет зависеть от габаритов энкодера. Так же следует учесть работу в условии смазки и искрении коллектора двигателя при его вращении.
Оптический датчик сильно зависит от освещения, а так же не способен работать в условии смазки. Механические передачи ведут в увеличению погрешностей и сложности конструкции.
Магнитные датчики основанные на явлении Холла не зависят от изменения освещения. Способны работать в условии смазки. Влияние постоянных магнитов двигателя и магнитного поля обмотки якоря не сказывается на работе датчика Холла, так как энкодер находится на значительном расстоянии. А так же магнитные линии двигателя проходят параллельно чувствительному элементу в датчике Холла.

В зависимости от требований по точности позиционирования рассчитываем размеры и количество магнитов на валу якоря двигателя.