
Один из главных недостатков современных роботов – несовершенство их механической части. Для приведения аппаратов в действие обычно используются традиционные пневмо-, гидро- и электроприводы, изготавливаемые с большим участием металлов. Это делает тела механизмов весьма тяжелыми относительно их объема, что, в свою очередь, требует массивных источников энергии, еще больше увеличивающих вес, но, все равно, не способных обеспечить длительное автономное функционирование машин и необходимые силовые характеристики.
Такое положение дел терпимо при производстве стационарных и малоподвижных манипуляторов, но совершенно неприемлемо при создании мобильных устройств. Нельзя сказать, что создатели роботов сидят сложа руки, ничего не делают. Наоборот: во всем мире предпринимаются бесчисленные попытки создать искусственные мышцы, которые были бы легкими, мощными, экономичными, простыми в изготовлении и универсальными. Чтобы их можно было использовать для получения всех необходимых боту движений и в различных средах. Однако, пока лидер в этой гонке не определился. А мышцы получаются либо слабыми, либо сложными, либо дорогими и пригодными лишь для узкого применения.
Автором этих строк движет убеждение, что такие мышцы изобретены им давным-давно, но не используются современными конструкторами из-за своей неизвестности и слабой системной проработанности первоначально высказанной идеи. Речь идет о простом, но универсальном способе получения механического перемещения, защищенным Авторским свидетельством «Захват манипулятора» с приоритетом от 24 августа 1984 г. Универсальность решения обеспечивается использованием одного и того же силового элемента для получения самых разнообразных движений робота.
В настоящее время, из известных автору попыток, ближе всего подошли к этому принципу изобретатели из Научно-технического университета Китая, создавшие пневморуку на подобном принципе, представленную на конференции ICRA-2017. Увы! Придется разочаровать китайских товарищей: они изобретают велосипед! Да к тому же, ничего не слышно с тех пор о дальнейшем развитии ими данной идеи. А зря! Потенциал у нее – огромнейший.
Впрочем, есть еще одна попытка использовать этот принцип движения – американцами, при создании складной пневморуки, представленной уже на ICRA-2019. Только непонятно, как они пришли к этой идее: придумали сами, заимствовали у китайцев или у автора этой статьи… Во всяком случае, эти попытки использования идеи убедительно доказывают ее жизнеспособность, но они есть ничто по сравнению с тем, что она способна дать. Именно поэтому ощущается острая необходимость показать все возможности нового подхода, раскрыть все его потенции.
1. Сила робота
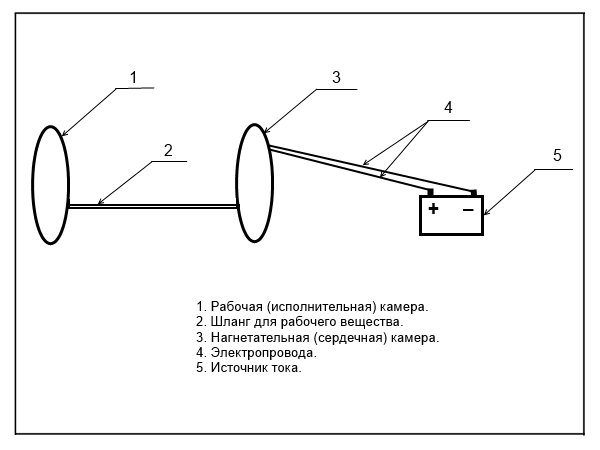
В качестве универсального силового элемента предлагаемой конструкции роботов используется камера овальной в поперечном сечении формы, способная расширяться и сжиматься по направлению малой оси овала при изменении давления в ней. В продольных сечениях по малой и большой осям овала форма камеры диктуется теми обстоятельствами, в которых ей придется работать, но, в любом случае, эта форма должна исключать лишние напряжения в материале при расширении и сжатии камеры.
Силовая камера изготавливается из прочного, герметичного, упругого и гибкого, но нерастяжимого материала. Для изменения формы камеры используется газ или жидкость. Выбор вещества зависит от необходимой силы, скорости и точности движений робота, а также среды, в которой ему придется действовать. Для изменения формы камеры можно использовать и электрический ток. Но для его применения камеры нужно делать из электроактивных полимеров. А расширение и сжатие камер получать не путем изменения давления в них, а за счет изменении формы камерных стенок при подаче напряжения на них.
Этот вариант особенно актуален для мелких роботов, внутри которых невозможно расположить нагнетатель рабвещества в виде обычного насоса или компрессора. В роли создателя давления в рабвеществе могут использоваться сами камеры из электрополимеров. Так как при расширении и сокращении под воздействием электричества они создают давление и разрежение внутри себя. То есть, они могут быть не только исполнительными, но и нагнетательными, управляющими величиной давления в обычных камерах. Из электрокамер можно образовать «сердце» робота – устройство, способное создавать давление в его «крови» и подавать его к исполнительным камерам. (Принципиальная силовая схема робота представлена на рисунке ниже.)
2. Мышцы робота
Силовые камеры можно соединять между собой различными способами, что дает следующие виды мышц – прямые, гибкие, угловые, плоские и кольцевые.
Мышцы робота, способные совершать прямолинейные движения, получаются из двух и более элементарных силовых камер, соединенных между собой по малой оси их овала. Это дает возможность получать гораздо бо́льшие линейные перемещения за счет суммирования передвижений, даваемых каждой отдельной камерой. Более того, для устранения внешних помех при работе мускула и обеспечения независимости ее от вида и состояния окружающей среды, соединенные в одно целое элементарные камеры заключаются в замкнутую оболочку (кожух) из однородного с ними материала. Кожух разделен внутри себя на камеры, которые можно назвать вспомогательными (периферийными) по отношению к основным (центральным). На рисунке изображен вариант робомускула из трех силовых основных камер и двух вспомогательных.
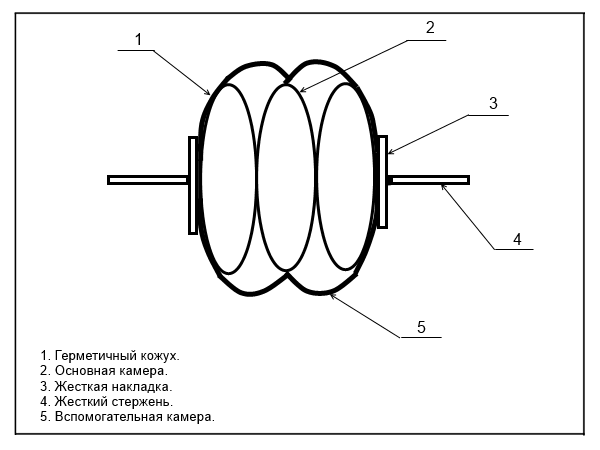
По сути, предлагаемое устройство представляет собой гибкий цилиндр двухстороннего действия, в котором основные камеры работают на распрямление мускула в рабочем направлении, а общая, наружная камера (гибкая гильза) обеспечивает его сокращение. Поэтому он сможет работать независимо от давления окружающей среды. Даже в вакууме мышца будет сокращаться за счет давления вспомогательных камер. Что сделает ее работу возможной в открытом космосе. К тому же, вспомогательные камеры могут давать более высокое давление, нежели окружающая среда, потому и основные камеры будут работать под более высоким напряжением, что обеспечит более точные и лучше контролируемые движения робота. Наконец, конструкция мускула исключает утечки рабвещества за счет износа трущихся соединений, как это есть в традиционных пневмо- и гидроприводах.
Для создания гибкого мускула необходимо одну из сторон его кожуха, примыкающую к центральным камерам со стороны большой оси овала, заменить на гибкую, нерастяжимую и несжимаемую пластину, исключающую перемещение этих концов камер из нейтрального положения. Полученная конструкция, при увеличении и уменьшении давления в камерах, будет изгибаться в противоположных направлениях. Для большего эффекта к пластине необходимо присоединить таким же способом набор камер и с противоположной стороны. Если снабдить некоторые камеры каждого слоя гибкого мускула не общим, а индивидуальным подводом рабочего тела, то такие мышцы смогут изгибаться не по всей длине, а лишь в избранных местах. При этом, остальные части мускула могут стать достаточно твердыми и жесткими, если во все камеры каждого слоя на этих участках будет подано большое давление одновременно. И такие части мускула можно заменять полыми жесткими вставками, получая конструкцию с комбинацией гибких и жестких частей по длине.
Если взять прямой мускул из нескольких камер и соединить их со стороны большой оси овала в одной точке частью кожуха в виде гибкой и нерастяжимой связки, то получится нечто вроде веера камер, способного раскрываться при подаче давления в них и превращаться в плоскую стопку камер при удалении рабочего тела из них. Такие мускулы могут быть использованы для устройства одно- и многосторонних суставов робота. Причем, каждый угловой мускул сможет работать и на сгибание, и на разгибание жестких элементов каркаса, соединенных суставом. И это обеспечит более плавные движения кинетического звена.
При соединении камер только со стороны большой оси овала получаются плоские мышцы робота. Эти мускулы можно использовать, к примеру, для сочленения жестких элементов каркаса робота не шарнирных, а более простых – наподобие тех, что есть в позвоночниках животных. Плоские мускулы в таких случаях будут играть роль межпозвоночных дисков.Если плоскую мышцу робота выполнить в виде одного ряда камер и соединить свободные концы крайних камер, то возникнет мускул в виде кольца, способный уменьшать его внутренний диаметр и увеличивать наружный при подаче давления в камеры. Эту конструкцию можно использовать в исполнительных органах роботов для захватывания предметов как внутренними, так и наружными поверхностями кольца. Если же соединить кольцевые мышцы в трубку и заключить ее в нерастяжимую наружную и растяжимую внутреннюю оболочку, то мы будем иметь нечто вроде кишки животных, способной совершать перистальтические движения и перемещать вещества, находящиеся в ней.
3. Тело робота
Внутренний каркас сложного робота нетрудно выполнить из комбинации жестких элементов и камерных мышц, располагаемых в сочленениях жестких частей каркаса для изменения их взаимного расположения. В необходимых случаях мышцы в сочленениях должны быть дополнены другими видами мускулов, чтобы получить исполнительные органы робота нужной силы и точности. Сердце крупного робота можно выполнить из традиционных электронасосов или компрессоров, но, вне сомнения, экономичнее и практичнее конструировать его из электрополимерных камер, если последние смогут обеспечить необходимые величины давлений и разрежений внутри них.
Для изоляции всего робота от неблагоприятных воздействий окружающей среды необходимо всю его конструкцию заключить в герметичную и прочную оболочку (кожу). Внутреннее пространство машины должно быть разделено на изолированные отсеки (для повышения ее живучести), и заполнено рабвеществом, соответствующим окружающей среде. Давление его должно превышать давление среды, с целью придать аппарату дополнительную жесткость и красивые внешние формы.
Кожух желательно выполнить двуслойным с тем, чтобы пространство между слоями сделать изолированным от остального внутреннего объема и закачать в эту прослойку газ или жидкость среднего между внутренним и наружным давления. Она будет выполнять роль подкожного «жира», что сделает аппарат похожим на мягкую игрушку и решит проблему с безопасностью функционирования машины в окружении людей или каких-то других «нежных» объектов. А также уменьшит возможность повреждения внутренностей устройства и улучшит их звуко- и термоизоляцию.
***
Роботы предлагаемой конструкции будут обладать следующими несомненными достоинствами:
1. Они смогут работать в атмосфере, под водой и в космосе.
2. Их исполнительные органы позволят манипулировать предметами различной конфигурации и жесткости, а также смогут давать машине весь спектр перемещений – от простого ползания полета.
3. Такие машины будут гораздо легче аналогов. Что обеспечит более длительную автономную работу при тех же источниках питания и уменьшит расходы энергии при их транспортировке в нерабочем состоянии.
4. Тело роботов данной конструкции легко сложить в транспортное положение, выпустив рабочее вещество из камер и сложив их вместе с жесткими частями тела. Что важно при перемещении роботов, особенно на орбиту Земли и на другие планеты.
5. Они будут гораздо надежнее тех, что используют традиционные пневмо-, гидро- и электроприводы, ибо в них отсутствуют трущиеся детали.
6. Использование рабвеществ, однородных с окружающей средой, повысит живучесть робота, так как при утечках в случае повреждения робот сможет восстановить необходимый объем рабочего тела, закачав его извне.
7. Эти механизмы будут намного безопаснее применяемых обычно сейчас.
8. Такие роботы будут действовать бесшумно за счет автономной работы силовых устройств и хорошей изоляции их от окружающей среды.
9. Камерные роботы будут гораздо дешевле аналогов.
Все это обеспечит быстрое распространение роботов не только в промышленном производстве, но и в сельском хозяйстве, быту и космосе. Ведь одна из главных причин торможения в этом деле – сложность механики современных роботов, и вытекающая отсюда дороговизна их.
Полный вариант статьи – здесь!
Антон Иванович Ситников
0 комментариев на «“Механика роботов. Окончательное решение проблемы”»
В статье предлагается механическая система, способная давать самые разнообразные перемещения и действовать под водой, в атмосфере и космосе. Изобретение предназначено для создания роботов, экзоскелетов и протезов.
Обсуждение идей ведется на Roboforum, е.
В топике «Механика роботов. Вариант решения проблемы» —
roboforum.ru/forum35/topic18327.html
Буду рад участию всех неравнодушных…