
Всем привет давно я ничего не писал, но работа над wiicopter’ом продолжается.
Чуть больше месяца назад я заказал с dealextrime контроллеры для wii. Спустя ровно 21 день они приехали ко мне. По внешнему виду мне очень понравился нунчак прям из рук выпускать не хотелось, думал если получится подключить к ардуйне закажу ещё один. Но хорошо что не заказал) Сразу скажу если вы задумали тоже построить вии коптер покупать китайские подделки под вии-контроллеры не стоит. Сейчас китайцы поняли что эти контроллеры стали пользоваться бешеной популярностью и стали экономить на чипах. К примеру мне в чаке пришел чип совсем без маркировки и в итоге я у меня не получилось с него с читать данные, вроде он инициализируется но всё время приходят одни и те же цифры.
Для полётов достаточно одного гироскопа, о нём и расскажу.
Если вы всетаки решитесь сэкономить и заказать wmp(гироскоп), то с очень большой вероятностью вам придёт именно такая плата:

Данная плата построена на гироскопе ITG3205, дешёвом аналоге ITG3200. Её желательно подключать не через привычный разъем, на прямую к линиям SCL и SDA. При таком подключении существенно снижается время выполнение цикла и плата работает более стабильно.
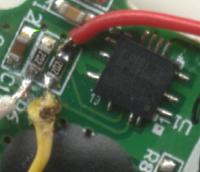
Белый провод подключаем к A4, жёлтый к A5. Питание +5V подаётся на стандартный разъём для подключения.

После подключения скачиваем прошивку MultiWiiCopter выбираем тип коптреа раскомментировав нужную строку. В моём случае это #define QUADX(Квадрокоптре с формой лучей Х). И выбираем почти наш гироскоп #define ITG3200. Всё, теперь прошивку можно загружать в ардуино.
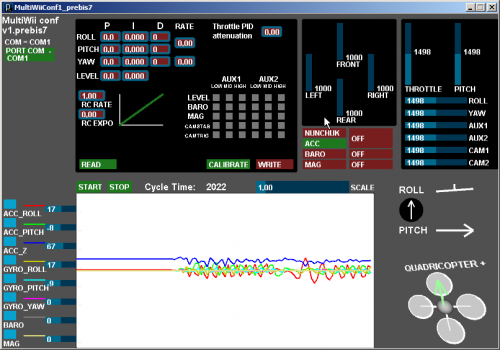
В архиве с прошивкой есть программы MultiWiiConf для отладки платы, в ней можно посмотреть какие значения выдаю датчики и при необходимости откалибровать их.
Но вот пока и всё. Скорее следующая статья будет о законченном коптере. В его сборке нет ничего сложного. Если вы решите собирать виикоптер лучше не экономте на датчках, купите чуть более дорогие, но проверенные. К примеру датчики серии Twig на сайте http://www.seeedstudio.com
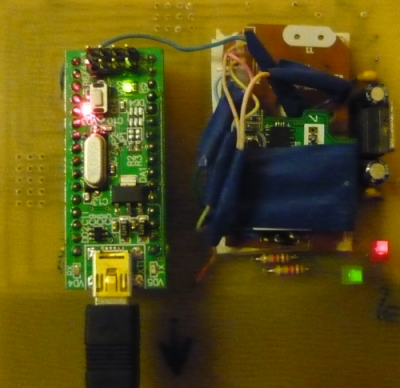
Мой полётный контроллер
Видео как контроллер реагирует на перемещения в пространстве. Акселерометр идеализируется, но значения по осям приходят одинаковые. Расчёт положения происходит при помощи гироскопов.
http://www.youtube.com/watch?v=n_ztJvg__g8
Несколько ссылок:
Обсужедние проекта на русском
Краткое описание датчиков
Официальный сайт MultiWiiCopter
0 комментариев на «“Строим бюджетный трикопртер — этап 2 «Создание полётного контроллера»”»
c чего бы это для полетов хватало одного гироскопа?
mems гиры измеряют угловую скорость, а если у вас будет постоянный крен — гира об этом вам не скажет.
для нормального управления нужно магнитометр + аксель + гира [+ барометр + гпс]
угу и инфракрасный датчик горизонта и уз-высотомер=)
высотомер — да, если будет в автоматическом режиме летать ( тогда еще по кругу надо штук 8 дальномеров ставить хотя бы 5-7м дальности ),
а датчик горизонта зачем?
для шутки=)
xtile просто такой набор перечислил «для нормального управления» что не удержался и добавил=))
А вообще — тоже искренне считал что нужен минимум акскль и гиря, с удовольствием посмотрю как вы практикой опровергненте наши заблуждения=)
для шутки=)
просто вы такой набор перечислили «для нормального управления» что не удержался и добавил=))
А вообще — тоже искренне считал что нужен минимум акскль и гиря, с удовольствием посмотрю как практикой опровергнут наши заблуждения=)
Есть проект называется КKmulticopter. E него из датчиков только 3 одно осевых гиры. Вполен стабильно летает. Некоторые даже для FPV его используют.
Добавил видео как работает контроллер на гирах. При замирании под углом модель постепенно возвращается в начальное положение, но так как коптер постоянно в движении погрешность расчётов мала.
спасибо.
выходит, здесь тот факт, что равновесие динамически неустойчиво играет на руку