
Управление Arduino через RS-485

Tom Lynch разработал свои собственные аппаратную платформу и формат управляющего пакета для управления контроллером по протоколу RS-485.
Подробности: RS-485 node control for Arduino
Вышла Arduino Due — первый официальный Arduino на базе ARM (AT91SAM3X8E)
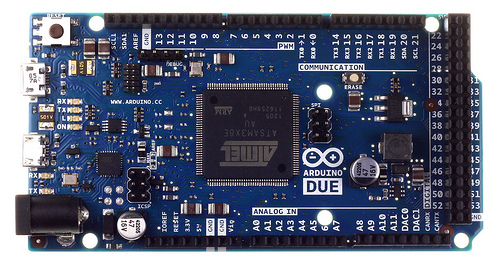
Microcontroller AT91SAM3X8E Operating Voltage 3.3V Input Voltage (recommended) 7-12V Input Voltage (limits) 6-20V Digital I/O Pins 54 (of which 12 provide PWM output) Analog Input Pins 12 Analog Outputs Pins 2 (DAC) Total DC Output Current 130 mA DC Current for 3.3V Pin 800 mA DC Current for 5V Pin 800 mA Flash Memory 512 KB SRAM 96 KB (two banks: 64KB and 32KB) Clock Speed 84 MHz
А ещё вышла новая Arduino Micro — контроллер Arduino на ATmega32u4, разработанный вместе с ladyada.
Подробности: http://arduino.cc/en/Main/ArduinoBoardDue
![]()
Вышли Arduino IDE 1.0.2 и 1.0.3
В конце октября, официально выпущена в продажу Arduino Due, для поддержки которой вышла ArduinoIDE 1.5. После, вышла ArduinoIDE 1.0.2 — она не поддерживает Due, но содержит полезные фиксы для контроллера Arduino Leonardo.
скачать
Подробности: Arduino Software Release Notes
Соединение нескольких Arduino в последовательную UART-сеть
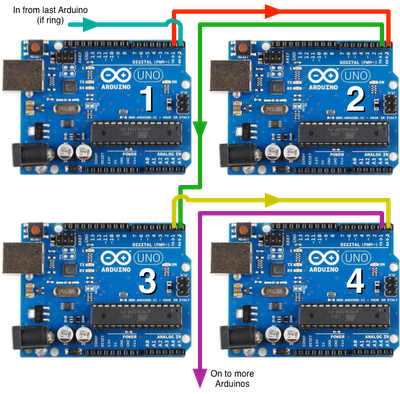
Подробности: Daisy Chaining Serial Connections
Avr OS на Arduino
Подробности: avr-os: Multitasking on Arduino
ROBOTC для Arduino

Подробности: http://www.robotc.net/download/arduino/
Настройка GCC для работы с TI Stellaris
флаги GCC:
CFLAGS += -mthumb #Using the Thumb Instruction Set CFLAGS += -mcpu=cortex-m4 #The CPU Variant CFLAGS += -mfloat-abi=softfp #Which floating point ABI to use CFLAGS += -mfpu=fpv4-sp-d16 #The type of FPU we are using CFLAGS += -Os #Compile with Size Optimizations CFLAGS += -ffunction-sections #Create a separate function section CFLAGS += -fdata-sections #Create a separate data section CFLAGS += -MD #Create dependency files (*.d) CFLAGS += -std=c99 #Comply with C99 CFLAGS += -Wall #Enable All Warnings CFLAGS += -pedantic #More ANSI Checks CFLAGS += -Dgcc #Flag used in driverlib for compiler specific flags CFLAGS += -DPART_LM4F120H5QR #Flag used in driverlib for specifying the silicon version. CFLAGS += -DTARGET_IS_BLIZZARD_RA1 #Used in driverlib to determine what is loaded in rom.
Подробности: A study of GCC and the TI Stellaris
![]()
Доступна ROS Groovy Beta 2
Подробности: ROS Groovy Beta 2 Available
Minecraft Reality — объекты Minecraft скрестили с дополненной реальностью
http://www.youtube.com/watch?v=2pOpcR7uf5U
Разработчики из 13th Lab разработали AR-приложение Minecraft Reality, которое позволяет размещать объекты из Minecraft в реальном мире. Для этого, нужно загрузить свои творения на сайт разработчиков, а затем просматривать их через камеру своего мобильного устройства.
Подробности: http://minecraftreality.com
Напомнило о кубик из Minecraft в реальности:
Minecraft: Pi Edition
На конференции Minecon в Париже, было объявлено об официальном портировании Minecraft Pocket Edition для миникомпьютера Raspberry Pi. Minecraft Pi Edition будет распространяться бесплатно, а самое главное — в ней можно будет манипулировать игровым миром программно, что будет не только развлечением, но и инструментом для обучения программированию.
Подробности: Minecraft: Pi Edition — video demo and more details
Arduino-shield для Raspberry Pi

Подробности: New Product: AlaMode Arduino-Compatible Shield for Raspberry Pi
Wall-Ye V.I.N. — робот для ухода за виноградниками
Подробности: AUTOMATION REACHES FRENCH VINEYARDS WITH A VINE-PRUNING ROBOT
http://wall-ye.com
Простой робот на MSP430
Код проекта опубликован в онлайн-MSP430 IDE
Подробности: Simple MSP430 based servo robot
Российские инженеры разрабатывают единый пункт управления группами боевых роботов
Из ЦНИИ робототехники и технической кибернетики (РТК) в Санкт-Петербурге, сообщают, что в России создается система централизованного управления группами боевых роботов. Имеются в виду различные робототехнические платформы для боевых действий, способные, в том числе, нести различные виды вооружения, а также для инспекционной деятельности, в частности, мониторинга уровня радиационного загрязнения.
Подробности: http://www.newsru.com/russia/26nov2012/droids.html
Разбираем робот-пылесос Yujin Robot iClebo Arte

На фотографии, можно видеть основные элементы робота-пылесоса: материнскую плату, электромоторы боковых щеток и всасывающего модуля, ЖК-экран, сенсорную панель, приводы левого и правого колёс. Справа, под ЖК-экраном находится ”мозг” робота – микроконтроллер Abov MC81F4216D
Подробности: http://habrahabr.ru/post/162311/
По теме: Разбираем робот-пылесос iRobot Roomba Sage 4110
Робот-пылесос iClebo Arte: отличается умом и сообразительностью
Интервью с Валерией Комиссаровой (Grishin Robotics)
Магазин приложений для роботов — это промежуточный шаг к cloud robotics. Следующий шаг — роботы, которые подключены к интернету и в режиме реального времени по необходимости скачивают программы. Робот распознаёт объект и сравнивает свою картинку с картинкой, находящейся в облаке. Плюс важно то, что можно аутсорсить вычисления в облако. Если индустриальный робот может работать автономно, то в персональной робототехнике есть проблема — ограниченные вычислительные мощности и запас батареи. В облако нельзя перенести то, что должно происходить в реальном времени, но энергоёмкие и затратные по времени вычисления — можно.
Подробности: Валерия Комиссарова (Grishin Robotics) о наступлении персональных роботов