
![]()
Не так давно, озадачился сравнением производительности OpenCV на разных платформах, чтобы понять какого быстродействия следует ожидать от программы с компьютерным зрением.
Была написана небольшая утилита — opencv_benchmark
Скачать исходники OpenCV benchmark: opencv_benchmark01.zip
Результаты получились довольно любопытные.
Для тестирования использовалась картинка 320х240: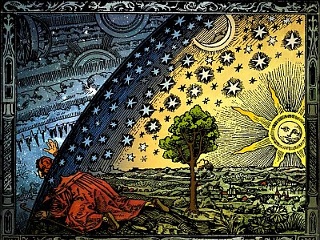
Каждый алгоритм прогонялся по 100 раз, средствами OpenCV засекалось время выполнения и возвращалось усреднённое значение в ms
в таблице:
Core i7 2.8GHz Core 2 Duo 2.26GHz Celeron 550 2.0GHz Core 2 Duo 1.6GHz Atom 1.60GHz ARM DM3730 - 1GHz cvConvertImage 0.115592 0.246101 0.205752 0.497979 1.274840 4.697266 cvCanny 2.019475 3.239408 3.747979 4.367728 6.795469 15.791321 cvSobel 0.155087 0.326020 0.551701 0.539373 0.908334 3.955688 cvLaplace 0.437235 0.796756 1.563274 1.376594 2.981850 87.927551 cvIntegral 0.123503 0.230013 0.270247 0.263338 1.536407 4.158936 cvExtractSURF 115.979919 153.451370 220.028625 232.772797 697.280029 3947.886719
в развёрнутом виде:
image.jpg 320x240 function ms Intel Core i7 2.8GHz / WinXP / OpenCV 2.1 / VC 2008 - Release cvConvertImage 0.115592 cvCanny 2.019475 cvSobel 0.155087 cvLaplace 0.437235 cvIntegral 0.123503 cvExtractSURF 115.979919 cvSmooth 0.322386 cv::FAST 3.910647 cvGoodFeaturesToTrack 3.879666 Intel Core i7 2.8GHz / WinXP / Virtual Box - Ubuntu 10.10 / OpenCV 2.2.0 cvConvertImage 0.160027 cvCanny 2.059421 cvSobel 0.266141 cvLaplace 0.454562 cvIntegral 0.125565 cvExtractSURF 86.754013 cvSmooth 0.318583 cv::FAST 3.718944 Intel Core 2 Duo CPU P9300 2.26GHz / Linux 2.6.30 / OpenCV 2.2.0 cvConvertImage 0.246101 cvCanny 3.239408 cvSobel 0.326020 cvLaplace 0.796756 cvIntegral 0.230013 cvExtractSURF 153.451370 cvSmooth 0.570008 cv::FAST 5.080717 cvGoodFeaturesToTrack 4.641660 Intel Celeron 550 2.0GHz / WinXP / OpenCV 2.1 / VC 2008 Express - Release cvConvertImage 0.205752 cvCanny 3.747979 cvSobel 0.551701 cvLaplace 1.563274 cvIntegral 0.270247 cvExtractSURF 220.028625 ARMv7 (DM3730 - BeagleBoard xM - 1GHz) / Linux 3.0.4-x3 / OpenCV Version: 2.3.2 cvConvertImage 4.697266 cvCanny 15.791321 cvSobel 3.955688 cvLaplace 87.927551 cvIntegral 4.158936 cvExtractSURF 3947.886719 Intel Core 2 Duo L7500 1.6GHz / Win XP / OpenCV 2.1 / VS 2008 - release cvConvertImage 0.497979 cvCanny 4.367728 cvSobel 0.539373 cvLaplace 1.376594 cvIntegral 0.263338 cvExtractSURF 232.772797 Intel Atom 330 1.60GHz / Linux 2.6.38-8-generic (Ubuntu 11.04) / OpenCV 2.3.1 cvConvertImage 1.274840 cvCanny 6.795469 cvSobel 0.908334 cvLaplace 2.981850 cvIntegral 1.536407 cvExtractSURF 697.280029 cvSmooth 2.086776 cv::FAST 9.948793 cvGoodFeaturesToTrack 21.354774
Разумеется, результаты не репрезентативны, но некоторое представление вполне дают.
Промежуточный вывод: Intel Core 2 Duo рулит, а вот нетбучный Intel Atom не радует, что ставит вопрос под его использование для интеллектуальных мобильных роботов.
ARM на BeagleBoard xM — тоже разочаровал, но тут ещё нужно исследовать вопрос (например, существует проект по использованию ARM-кого встроенного DSP):
OpenCV DSP Acceleration
http://code.google.com/p/opencv-dsp-acceleration/