

Robotino — это робот для обучения и исследования от фирмы Festo Didactic.
Festo, позиционирует Robotino, как робототехническую систему для базового и дальнейшего обучения, а так же как платформу разработки для университетов и колледжей.
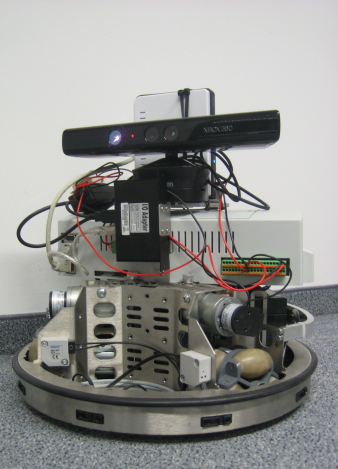
Robotino — это автономный мобильный робот, передвигающийся на трёх роликовых колёсах типа «omni wheel» («omnidirectional» — всенаправленный).
В движение, робота приводят три двигателя постоянного тока, оси которых расположены под углом 120 градусов друг к другу.
Такая особенность конструкции характерна для мобильных платформ на базе всенаправленных колёс, и, благодаря ей, робот может перемещаться во всех направлениях, а так же поворачиваться вокруг своей оси.
Устройство
Так как Robotino предназначается, главным образом, для обучения, то он выполнен модульно; все технические компоненты (электроприводы, датчики, камера), можно отключить от робота и изучить отдельно.

Подсистемы Robotino:
0. Корпус робота — стальной корпус с бампером, обеспечивающий лёгкий доступ к батареям, двигателям и портам робота
1. Подсистема питания — две аккумуляторные батареи (12V/5Ah кислотно-свинцой (lead-acid) или 12V/9Ah NiMH), позволяющие роботу работать в автономной режиме несколько часов.
2. Двигательная подсистема – три двигателя постоянного тока, редуктор и ременная передача на роликовые колёса, позволяющие роботу двигаться в различных направлениях.
Для стабилизации скоростей вращения валов двигателей робота, используются встроенные ПИД-регуляторы с предустановленными коэффициентами.
3. Подсистема одометрии — инкрементные энкодеры на валах двигателей.
4. Подсистема ввода/вывода — плата, выполняющая коммуникационную связь между компьютером робота и его датчиками, двигателями и интерфейсом ввода/вывода.
5. Подсистема беспроводной связи с внешним управляющим компьютером (Wi-Fi точка доступа).
6. Бортовой вычислитель — одноплатный промышленный компьютер формата PC/104+ (имеет шины ISA и PCI) с процессором на 300 МГц. В качестве памяти, используется карточка Compact Flash (1024 MB), на которую установлена встроенная версия операционной системы Linux.
7. Различные датчики робота — 9 инфракрасных датчиков расстояния (на бампере), USB web-камера).
Интерфейсы

Robotino поддерживает интерфейсы:
* USB
* Ethernet
* VGA
* 8 цифровых портов ввода-вывода
* 8 аналоговых портов ввода

К Robotino возможно подключение лазерных дальномеров, гироскопа и даже сенсора Kinect (через дополнительный компьютер).
Система управления

Управлять роботом, можно как с помощью программ, записанных в память робота, так и дистанционно — по каналу беспроводной связи Wireless LAN (WLAN).
Кроме того, возможно автономное программирование робота, через подключенные к нему монитор и клавиатуру.
В комплекте с роботом идёт программа Robotino View — программное обеспечение для интерактивного графического программирования робота.
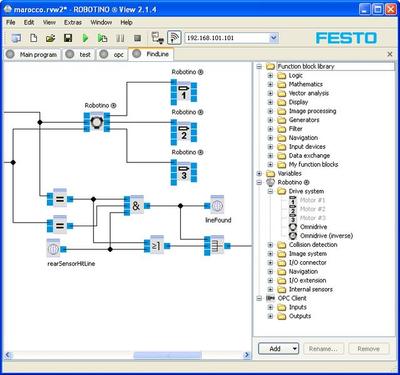
Robotino View, позволяет посмотреть состояние управляющих сигналов робота и его датчиков.
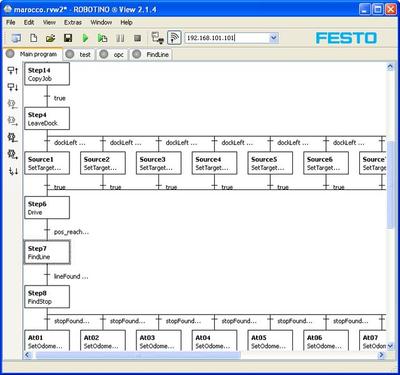
Робот может быть запрограммирован в графическом режиме — простым выбором необходимых функциональных блоков из имеющегося списка и их последующим комбинированием и настройкой (визуальное программирование).
Программное обеспечение робота можно разделить на две части: внутреннее программное обеспечение и внешнее.
Внутренне ПО робота — это его операционная система (Linux), которая осуществляет взаимодействие программного и аппаратного обеспечения робота, обработку внутренних команд и обмен данными со внешним управляющим компьютером.
Так же, ко внутреннему ПО робота можно отнести программы, хранящиеся в собственной памяти робота для его автономного управления.
Внешнее программное обеспечение — это программы реализующие связь и обмен данными с Robotino.
Это могут быть:
* программы, написанные на языках программирования высокого уровня (С, C++, Java, С#);
* среды программирования и визуального проектирования: Matlab, Simulink, Labview, ROS, Microsoft Robotics Developer Studio (для них есть специальная библиотека для управления роботом)
* среда визуального проектирования Robotino View.
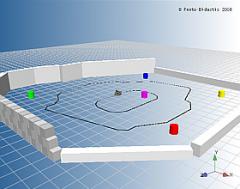
* виртуальный симулятор Robotino SIM, позволяющий управлять виртуальным Robotino.
Команды управления, поступающие на робота из внешнего программного обеспечения, выполняются последовательно и поэтому робот не может выполнять несколько команд одновременно.
Т.о. после передачи соответствующей команды роботу, программа управления приостанавливается и ожидает пока робот не выполнит заданное действие.
Внутренности

На следующих видео-роликах можно посмотреть процесс разборки Robotino и ближе познакомиться с его внутренним устройством:
Festo Robotino — Desensamble
Фотография компютера PC/104+ и интерфейсной платы

Колёсный узел
Колёсный узел Robotino представляет собой следующую конструкцию:
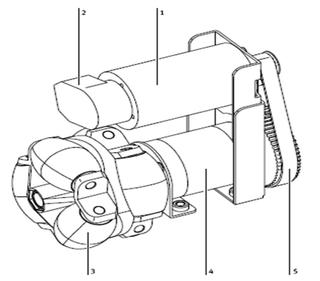
, где
1 – двигатель,
2 – энкодер,
3 – ролик всенаправленного колеса,
4 – редуктор,
5 – ременная передача.
Вращение двигателя передаётся на ось колёса через редуктор с передаточным отношением 16:1.
Измерение угловых скоростей вращения валов двигателей, осуществляется при помощи инкрементных энкодеров.
ROS
Под ROS, реализован стек, позволяющий работать с Robotino
http://ros.org/wiki/robotino
Robotino ROS
Видеоролики
robotino 360
Festo — Robotino® XT Animation (English)
Robotino Olympics in Ukraine
Robotino en SkillsUSA
Robotino+MPS ScienceHouse Rust
Ссылки
http://www.festo-didactic.com
http://www.festo-didactic.com/int-en/learning-systems/education-and-research-robots-robotino
Robotino®
http://en.wikipedia.org/wiki/Robotino
http://en.wikipedia.org/wiki/Omni_wheel
http://www.openrobotino.org
http://wiki.openrobotino.org
http://forum.openrobotino.org
http://ros.org/wiki/robotino
По теме
mBot — робот для обучения программированию и робототехнике
0 комментариев на «“Robotino — робот для обучения”»
Интересно было бы найти что-нибудь оптимальное с возможностью расширения для ROS, эта штука вроде подходит, но цены я что-то не нашел, а обычно то, чем гордятся выставляют напоказ, значит цена не из числа их гордости…
Есть у наших коллег (Фесто учебный центр) такая штука. Прикольно. Дорого. Мало толку.
Всё время показывают этого робота на выставках.