
Идея использовать Wi-Fi роутер в качестве мозгов робота или дополнительного вычислителя не нова.
Действительно, роутеры становятся доступнее и мощнее, на большинство из них без проблем устанавливается OpenWRT, а ещё они обзаводятся USB-портами, к которым можно подключить, например, веб-камеру.
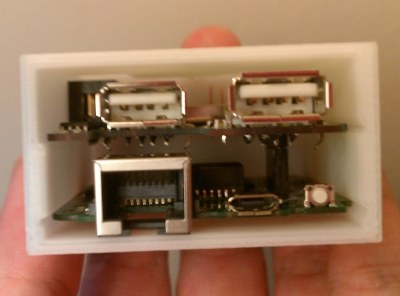
Так что ничего удивительного, что начинают появляться платы-расширения, позволяющие более удобно использовать роутеры в «хакерских» целях 😉
Например, добавить USB-концентратор и удобно вывести UART (добавив FTDI).
Ссылки
TP-Link WR703N Expander — Open Source Hardware
http://wiki.openwrt.org/toh/tp-link/tl-wr703n
По теме
исследование ADSL-роутера на базе Linux
Превращаем ADSL-модем в Ethernet-шилд для Arduino/CraftDuino
0 комментариев на «“Плата ввода-вывода для TP-Link WR703N”»
Сейчас по моему выгоднее купить какой нибудь дешевый GPS навигатор ценой 1800-2000 рублей и получишь при этом однопалатный компьютер с ARM процессором (500-600MHz),128Mb ram, 2-4Gb flash и аппаратной поддержкой USB host (как правило поддержка usb хоста тупо отключена в реестре Windows CE), сенсорный экран ну и само собой GPS модуль.
p.s.: Raspberry Pi отдыхает. imho.
В эти дешевые навигаторы/планшеты/кногочиталки также трудно подцепить периферию, как и в указанный TP-Link. Мелко всё внутри 🙂 Но TP-Link и Raspberry PI хоть стоят дешевле ($23 и $35_не_считая_доставки соответственно), и это их оправдывает 🙂
А Arduino тупо повсюду лепят, т.к. их программировать легко…