
![]()
А почему на вход cvThreshold() должны поступать только изображения в градациях серого?
на вход cvThreshold должно поступать одноканальное изображение (да — градации серого, т.е. яркости)
всё логично, т.к. пороговое преобразование работает с яркостью.
Разумеется можно обработать и цветную RGB-картинку:
для этого её сначала придётся разбить на слои (cvSplit()),
проделать пороговое преобразование над каждым слоем,
сложить слои вместе (cvMerge())
Дополним пример 21 шага работой с RGB-слоями:
//
// пример порогового преобразования над RGB-картинкой
// cvThreshold() и cvAdaptiveThreshold()
//
// robocraft.ru
//
#include <cv.h>
#include <highgui.h>
#include <stdlib.h>
#include <stdio.h>
int main(int argc, char* argv[])
{
IplImage *image=0, *gray=0, *dst=0, *dst2=0;
IplImage* r=0, *g=0, *b=0; // для хранения отдельных слоёв RGB-изображения
// имя картинки задаётся первым параметром
char* filename = argc >= 2 ? argv[1] : "Image0.jpg";
// получаем картинку
image = cvLoadImage(filename, 1);
printf("[i] image: %s\n", filename);
assert( image != 0 );
// покажем изображение
cvNamedWindow( "original", 1 );
cvShowImage( "original", image );
// картинка для хранения изображения в градациях серого
gray = cvCreateImage(cvGetSize(image), image->depth, 1);
// преобразуем картинку в градации серого
cvConvertImage(image, gray, CV_BGR2GRAY);
// покажем серую картинку
cvNamedWindow( "gray", 1 );
cvShowImage( "gray", gray );
dst = cvCreateImage( cvGetSize(gray), IPL_DEPTH_8U, 1);
dst2 = cvCreateImage( cvGetSize(gray), IPL_DEPTH_8U, 1);
// пороговые преобразования над картинкой в градациях серого
cvThreshold(gray, dst, 50, 250, CV_THRESH_BINARY);
cvAdaptiveThreshold(gray, dst2, 250, CV_ADAPTIVE_THRESH_GAUSSIAN_C, CV_THRESH_BINARY, 7, 1);
// показываем результаты
cvNamedWindow( "cvThreshold", 1 );
cvShowImage( "cvThreshold", dst);
cvNamedWindow( "cvAdaptiveThreshold", 1 );
cvShowImage( "cvAdaptiveThreshold", dst2);
//=======================================================
//
// проведём пороговое преобразование над RGB-картинкой
//
r = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
g = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
b = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
// разбиваем на отдельные слои
cvSplit(image, b, g, r, 0);
// картинка для хранения промежуточных результатов
IplImage* temp = cvCreateImage( cvGetSize(image), IPL_DEPTH_8U, 1 );
// складываем картинки с одинаковым весом
cvAddWeighted( r, 1.0/3.0, g, 1.0/3.0, 0.0, temp );
cvAddWeighted( temp, 2.0/3.0, b, 1.0/3.0, 0.0, temp );
// выполняем пороговое преобразование
cvThreshold(temp, dst, 50, 250, CV_THRESH_BINARY);
cvReleaseImage(&temp);
// показываем результат
cvNamedWindow( "RGB cvThreshold", 1 );
cvShowImage( "RGB cvThreshold", dst);
//
// попробуем пороговое преобразование над отдельными слоями
//
IplImage* t1, *t2, *t3; // для промежуточного хранения
t1 = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
t2 = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
t3 = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);
// выполняем пороговое преобразование
cvThreshold(r, t1, 50, 250, CV_THRESH_BINARY);
cvThreshold(g, t2, 50, 250, CV_THRESH_BINARY);
cvThreshold(b, t3, 50, 250, CV_THRESH_BINARY);
// складываем результаты
cvMerge(t3, t2, t1, 0, image);
cvNamedWindow( "RGB cvThreshold 2", 1 );
cvShowImage( "RGB cvThreshold 2", image);
cvReleaseImage(&t1); cvReleaseImage(&t2); cvReleaseImage(&t3);
//=======================================================
// ждём нажатия клавиши
cvWaitKey(0);
// освобождаем ресурсы
cvReleaseImage(& image);
cvReleaseImage(&gray);
cvReleaseImage(&dst);
cvReleaseImage(&dst2);
cvReleaseImage(&r); cvReleaseImage(&g); cvReleaseImage(&b);
// удаляем окна
cvDestroyAllWindows();
return 0;
}
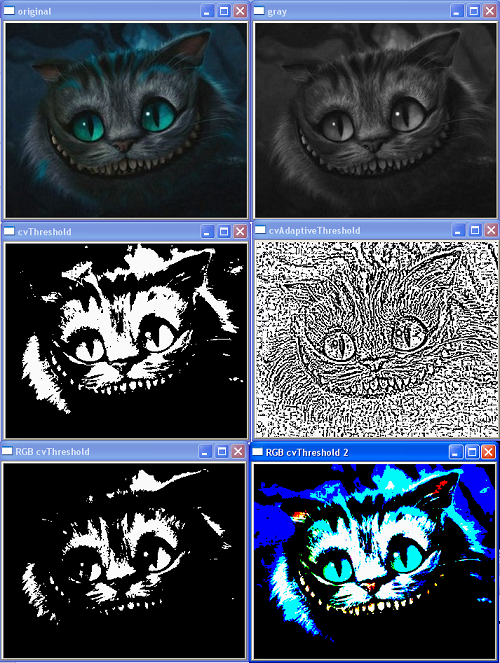
результат работы:
2 комментария на «“Вопросы OpenCV — пороговое преобразование над цветной картинкой”»
Добрый день!
Неправильно отрабатывает CV_BGR2GRAY. Что у меня не так? Спасибо:)
InitializeComponent();
cv::Mat bmp1 = cv::imread(«demo.jpg»);
cv::Mat bmp2 = cv::Mat(bmp1.rows, bmp1.cols, CV_BGR2GRAY);
cv::cvtColor(bmp1, bmp2, CV_BGR2GRAY);
WriteableBitmap^ wbmp = ref new WriteableBitmap(bmp2.cols, bmp2.rows);
IBuffer^ buffer = wbmp->PixelBuffer;
unsigned char* dstPixels;
ComPtrpBufferByteAccess;
ComPtrpBuffer((IInspectable*)buffer);
pBuffer.As(&pBufferByteAccess);
pBufferByteAccess->Buffer(&dstPixels);
memcpy(dstPixels, bmp2.data, bmp2.step.buf[1] * bmp2.cols * bmp2.rows);
image1->Source = wbmp;