

Робот-полотёр Mint, от компании Evolution Robotics, отличается от подавляющего большинства роботов-пылесосов, имеющих круглую форму, своей квадратностью, которая характеризуется конструкцией крепления тряпки (тряпка крепится в передней части робота на съёмную панель, которая держится на магнитах).
Так же, Mint отличается меньшим размером (ширина робота — всего 25 см).

Форма робота, позволяет успешно протирать поверхность пола вблизи от стен и углов.
В движение, робот приводится вполне стандартно — двумя двумя независимыми колесами, а так как других движущихся частей в роботе нет, то работает он очень тихо.

В качестве источника питания, Mint использует стандартную сборку из шести 1,2V никель-металлгидридных аккумуляторных элементов.

Старшие модели роботов, имеют небольшой контейнер для воды, которой смачивается тряпка в режиме влажной уборки.
http://www.youtube.com/watch?v=SJZe5LfYBqU
http://www.youtube.com/watch?v=deTxILHDJwI
Сзади, у робота есть ручка для переноски, а на лицевой части расположены три кнопки управления: кнопка включения-выключения и две кнопки выбора режима уборки — влажная и сухая.
Над кнопками, есть три светодиода, сигнализирующие состояние навигации.
Самостоятельно заряжаться Mint не умеет и это приходится делать вручную — гнездо для зарядки находится на нижней стороне корпуса робота.
Чтож, это был бы вполне стандартный и не особенно выдающийся робот-убощик, если бы не одно но — возможность локального позиционирования робота по технологии NorthStar.
Во время работы, робот точно знает где он находится и это позволяет ему строить карту убранной и грязной поверхности.
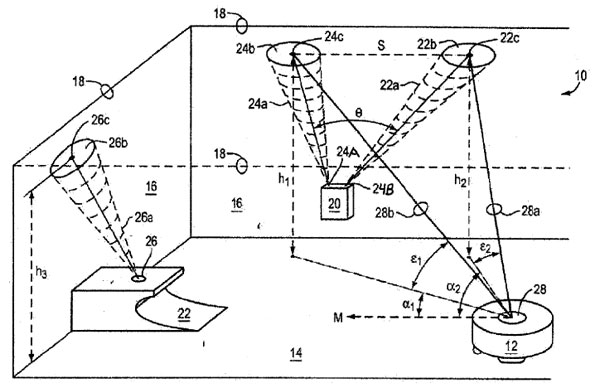
В отличие от Neato XV-11, который использует для построения карты, показания бортового лазерного дальномера, Mint использует отдельный конструктив в виде небольшого кубика (5x5x5 см), который представляет из себя ИК-проектор, строящий на потолке инфракрасный паттерн (линии).

При помощи камеры, расположенной в верхней части корпуса, робот считывает ИК-паттерн и методом триангуляции высчитывает где он находится.
Технологию NorthStar так же использует для локализации другой популярный робот — Rovio.

WowWee Rovio — трехколесный робот, управляемый через Wi-Fi для удаленного слежения за помещением.
Rovio оснащен подвижной цветной видеокамерой (максимальное разрешение 640 х 480), Wi-Fi модулем, процессором ARM9 (частота 200МГц), оперативной (8Мб) и флеш (2Мб) памятью , . Камера, микрофон и динамики Rovio позволяют не только наблюдать и слышать удаленно, но и передавать свой голос.
Rovio оснащен комнатной системой навигации Northstar, разработанной для использования в закрытых помещениях. Проецируя инфракрасным проектором специальный рисунок на потолок комнаты, Rovio способен определить свое местонахождение с точностью до 4 см и направление своего движения с точностью до 2 градусов.
Ссылки
http://mintcleaner.com
http://mintcleaner.com/howitworks/northstar/
http://www.evolution.com/products/northstar/ (PDF)
Робот-полотер Mint — обзор
Робот-полотер Mint 4200 – очередная умная швабра. Теперь с GPS
http://www.wowwee.com/en/support/rovio
(использовалась изображения с официального сайта Mint и обзора на exler.ru)