
Для экспериментов и развлечений с робототехникой очень хорошо обзавестись железом. Конечно можно все смоделировать на ПК. Но это же не так интересно. Хочется, потрогать, полюбоваться. Да и любовь к самодельщине у меня мало что убъет, поздно уже:)
Итак, железо бывает самым разнообразным: ловкие чудо-манипуляторы, летающие мультикоптеры, гусеничные вездеходы, что-то ползающее, гнущееся, кувыркающееся… да даже микроволновку в каком-то смысле можно назвать роботом:)
Я же решил остановиться на самом простом решении — колесной платформе. Платформа может быть простой, а вот установить на нее можно все, что угодно. Тот же PR-2 или Qbo построены на колесных шасси, что нисколько не умаляет их удивительности, лишь ограничивает проходимость.
Ну и это все же робоплатформа, а не грузовимк для гномов. Так что помимо колес и приводов должно быть еще что-то хоть сколько-нибудь автоматическое и интеллектуальное.
Конкретнее.
В качестве шасси будет взята платформа из двух колес, основания и шаровой опоры. Платформа будет двухуровневой: на нижнем уровне будут аккумуляторы потяжелее для устойчивости, драйвер двигателей, блок питания и еще что-нибудь, если уместится. На верхнем, управляющая логика и остальная переферия.
Еще конкретнее.
Чтобы добиться сложной и большой цели, ее стоит разбить на много маленьких простых целей. Это не только понятней, но и больше воодушевляет, т.к. психика получает удовлетворительный результат гораздо чаще, что усиливает мотивацию. А как известно, самая сильная мотивация — внутренняя:)
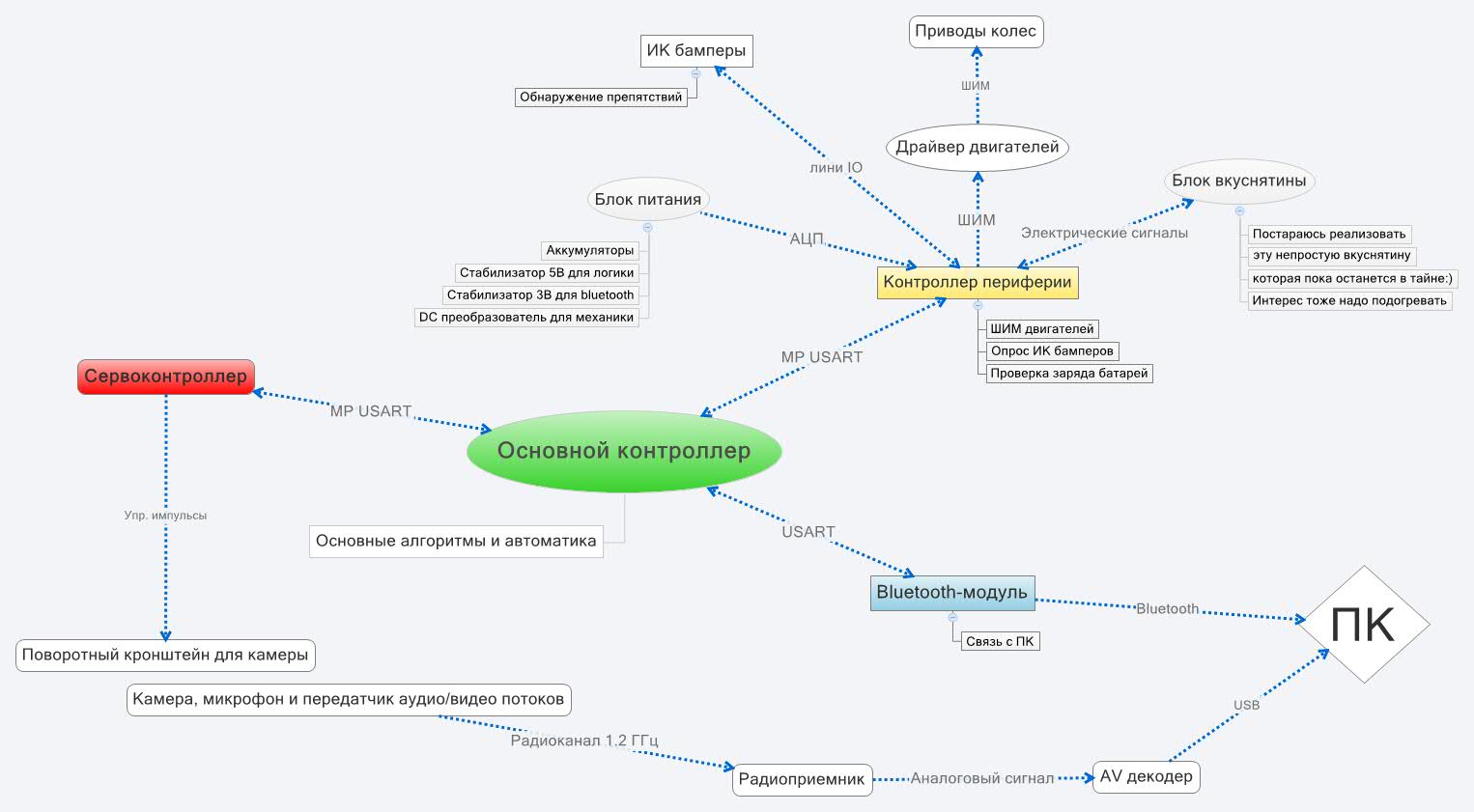
И так, разобъем нашу сложную систему на более простые: основной контроллер, контроллер двигателей и периферии, переферия и двигатели, блок питания и блок связи. Теперь осталось придумать, как это все связать воедино. Для связи переферии и контроллеров вполне себе подойдет мультимодульный USART. Можно было бы взять и IIC, но я терпеть не могу его реализацию в AVR контроллерах. MPCM USART тоже общается по двум проводам, вот только нет в нем нужды организовывать всю тьму повторных стартов, асков/наков и прочих операций, работу с которыми разработчики AVR возложили на наши плечи. Для работы с переферией и двигателями можно взять отдельный МК послабее, чтобы не грузить основной контроллер, который займем только логикой работы всего робота в целом. Нечего ему ШИМом дергать, если он главный:)
Хватит буков, смотрим блок-схему:
Само собой, ничто не мешает менять планы по ходу дела. Но начальное направление взято.
Как видно на схеме, питание от аккумуляторов (планируется взять Li-Ion х 3 = 11,1В) поступает на стабилизаторы и DC-преобразователь. Таким образом производится разделение питания логики, любящей стабильное напряжение и механики, потрябляющей большой ток.
Управление сервоприводами можно бы повесить и на контроллер переферии, но у меня уже есть готовый и работающий сервоконтроллер, и изобретать велосипед по второму разу не хочется.
Радиокамера с микрофоном только выезжает из Китая. Зная, как работает Почта Росии, ждать придется еще долго. И далеко вперед заглядывать не буду. С системами распознавания изображений пока не работал, так что назначение видеоподсистемы пока что ограничится передачей картинки.
В остальном — стандартный набор: L293, HC-05, ИК-светодиоды и фототранзисторы.
И еще про одну вкуснятину, которую я задумал, расскажу попозже. Это, так сказать гвоздь программы, и пока держится в тайне. Как осилю реализовать, сразу все подробно опишу:) Честно, за подобное пока не брался и погляжу, что из этого выйдет.
В каждом посте из цикла буду разбирать реализацию какого-нибудь блока, с подробным описанием и обоснованием почему выбрано именно это, а не какое-либо другое решение.
Ну и чтобы обещанного не пришлось 3 года ждать, пойду я собирать платформу.
Содержание серии:
0 — Планирование.
1 — Приводы и питание.
2 — Контроллер периферии и связь.
3а — Мультимодульный USART. Теория.
3б — Мультимодульный USART. Реализация.
0 комментариев на «“Колесная робоплатформа. Часть 0 — планирование.”»
Отлично! Робоплатформа — один из наших текущих проектов, находящихся в разработке.
Перенёс картинку на сервер 🙂
Да вы вообще молодцы. Разработать и запустить в производство две платы — большое достижение.
спасибо 🙂
возможно у вас есть какие-нибудь идеи/пожелания?