
Окончание . Начало — Часть1, Часть2 и Часть 3
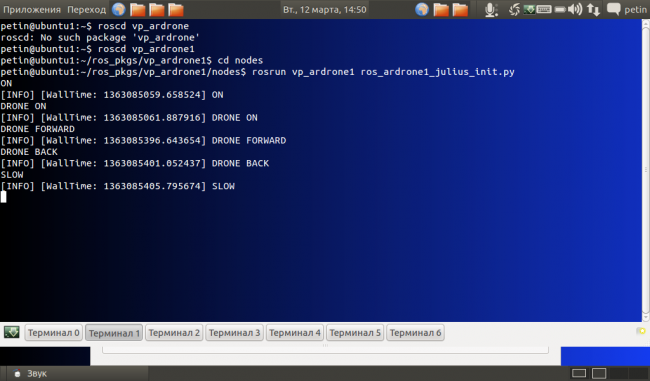
Вот результат работы
Пока еще не освоил написание запуска командных файлов, чтобы запустить все одной командой, пошаговая инструкция по запуску системы
Терминал 1
$ roscore
Терминал 2 — узел для перевода голоса в текст
$ roscd vp_ardrone1 $ cd nodes $ rosrun vp_ardrone1 ros_ardrone1_julius_init.py
Теперь необходимо запустить окно Приложения -> Системные -> Параметры системы -> Звук ,чтобы распознавание голоса работало нормально
По другому данную проблему пока не удалось решить
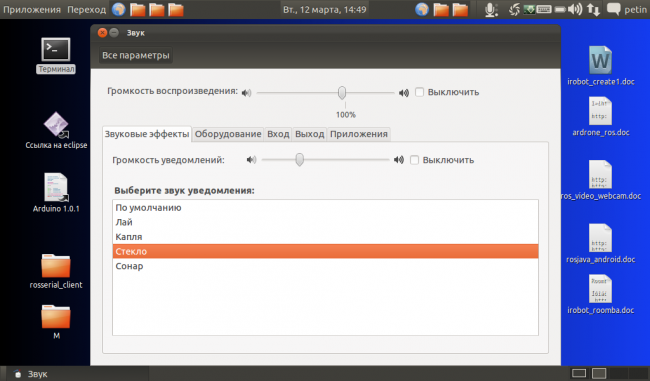
Для проверки произносим фразы из словаря в микрофон (встроенный или, как у меня, беспроводной)
Терминал 3 — узел для перевода текста в цифровую команду
$ rosrun vp_ardrone1 ros_ardrone1_text_to_command_julius.py
Терминал 4 — узел для перевода цифровой команды в команду для драйвера ardrone_autonomy
$ rosrun vp_ardrone1 ros_ardrone1_command_to_move.py
Терминал 5 — узел для перевода цифровой команды в команду для драйвера ardrone_autonomy (cmd_vel)
$ rosrun vp_ardrone1 ros_ardrone1_command_to_move_odom.py
Подключим для подстраховки джойстик
Терминал 6
$ rosparam set joy_node/dev "/dev/input/jsX0" $ rosrun joy joy_node
Терминал 7
$ rosrun vp_ardrone1 ros_ardrone1_joystick_to_move.py
Терминал 8
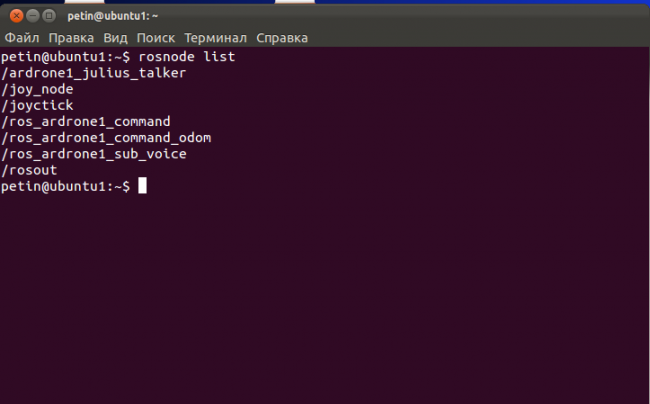
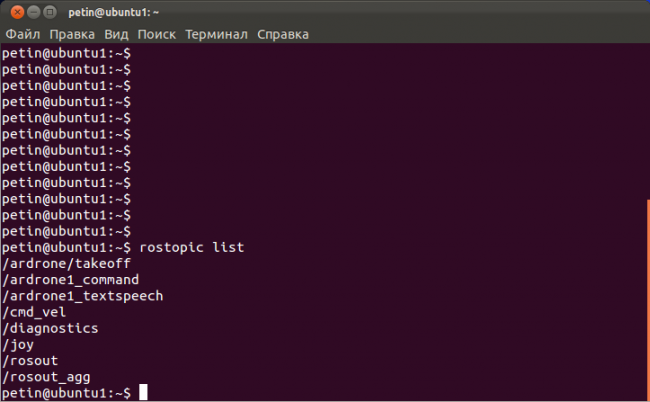
Смотрим в терминале список тем, топиков, параметров.
$ rosnode list
$ rostopic list
$ rosparam list
Включаем квадрокоптер Ardrone. Подсоединяемся по Wifi c нетбука к сети ardrone2_xxxxxx
запуск драйвера ardrone_autonomy
$ rosrun ardrone_autonomy ardrone_driver
Пробуем произнести команды
DRONE HI — 5-секундное зеленое мигание светодиодами
DRONE BUY — 5-секундное красное мигание светодиодами
DRONE THANKS — 5-секундное оранжевоее мигание светодиодами
И теперь запуск
DRONE ON или просто ON
video (Видео выложу чуть позже — при съемках произошел краш коптера — требуется значительный ремонт)
Скачать проект из репозитория — ссылка
0 комментариев на «“Голосовое управление квадрокоптером ArDrone 2.0 через ROS.Часть 4”»
Прекрасный проект! Скажи, использовал ли ты сервисы калибровки Ar.Drone, которые есть в ardrone_autonomy?
Извиняюсь, что долго не отвечал — только увидел комментарий
Нет сервисы калибровки не использовал
У меня есть несколько вопросов к вам по теме. Как с вами можно связаться?
напишите мне, пожалуйста, на электронную почту oleg0216@gmail.com
Или через ВКонтакте
victor.petin@gmail.com