
Содержание:
1. Введение. Исходные данные. Требования. Выбор типа датчика.
2. Выбор компонентов. Разработка конструкции энкодера.
3. Разработка алгоритма
4. Тестирование
2. Выбор электротехнических компонентов
2.1. Датчик Холла
Эффе́кт Хо́лла — явление возникновения поперечной разности потенциалов (называемой также холловским напряжением) при помещении проводника с постоянным током в магнитно поле (рисунок 2.1.).
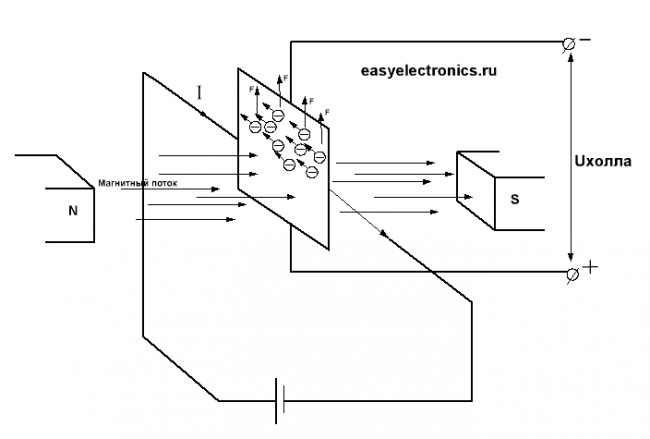
рисунок 2.1.
Схема подключения датчиков Холла (SA1, SA2) к микроконтроллеру (блок управления) изображена на рисунке 2.2.
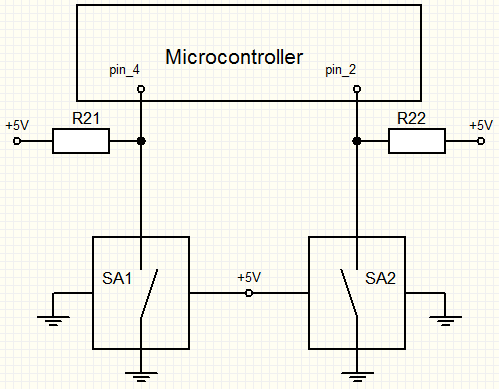
рисунок 2.2.
Назначаем самый распространенный микро датчик Холла, работающий на логическом уроне:
AH513 bipolar latching Hall-effect Switch Integrated Circuits
скачать datasheet
2.2. Магнит цилиндрический
Чтобы добиться оптимальной работы датчика нужно учесть магнитную силу срабатывания датчика Холла, расстояние до магнита, размеры магнита, количество магнитов.
По паспорту двигателя передаточное число с вала якоря двигателя на выходной вал приблизительно 60.
В зависимости от требований по точности количество импульсов за 1 оборот вала якоря будет:

Каждый магнит, проходя через 2 датчика Холла (рисунок 2.2.1.) дает 2 импульса. Следовательно потребуется 5 магнитов для 10имп/оборот. Но датчик Холла требует размагничивания, поэтому магниты ставятся по очереди с разным направлением полюсов.
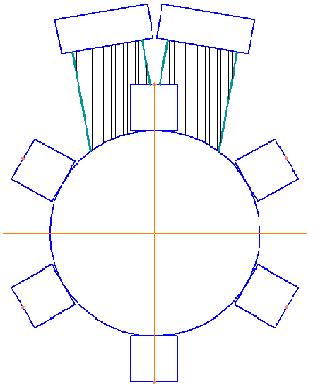
Рис.2.2.1.
Следовательно необходимо иметь четное количество магнитов. Принимаем 6 магнитов.
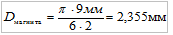
Расчет геометрических размеров магнит. Диаметр вала двигателя 9мм. Следовательно оптимальный размер магнита будет:
Требуемая магнитная сила, для срабатывания датчика Холла (указана выше в datasheet): 10мT. Отсутствуют требования (в datasheet Датчика Холла) по максимальной допустимой магнитной силе воздействия.
Принимаем Магнит цилиндрический №002 (D — 2, H — 2) N 38 — 140 гр.
Hcj = 10-25 кЭ, Br = 0,89 — 1,08 Тл

Рис. 2.2.2.
2.3. Разработка конструкции энкодера
Одно из основных требований, является определение направления вращения вала. Для определения направления вала двигателя необходимо иметь два датчика Холла.
Расположение датчиков Холла.
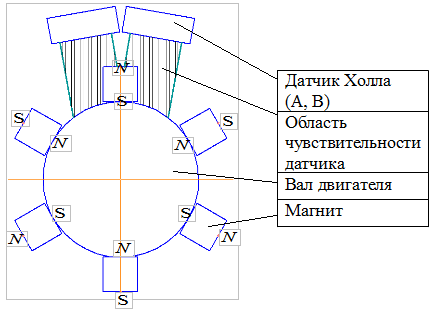
Рис. 2.3.1.
Расположение датчиков Холла друг относительно друга должно быть такое, чтобы воздействие от ближайшего магнита было непрерывным на какой-либо из датчиков за все время прохождения магнита под датчиками до взаимодействия со следующим магнитом.
То есть чтобы получить сигнал, который показан на рисунке 2.3.2.
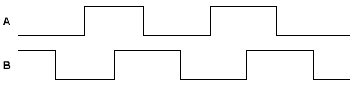
рисунок 2.3.2.
Дополнение:
В качестве клея решил использовать эпоксидный, с двумя компонентами для смешивания. Прежде чем клеить рекоммендуется склеиваемые поверхности протереть ацетоном или спиртом ().
Датчики Холла приклеены к боковой стенке редуктора. Особо важно при монтировании магнитов соблюдать чередующуюся полярность. Магниты были довольно сильные, даже при тестировании держались без клея на максимальных оборотах. Расстояние до магнитов примерно 2..3мм (реагируют до 15мм), угол между датчиками (примерно 120..130 градусов, но это только для данного датчика!). Все геометрические вычисления были сделаны и успешно забыты после уточнения практикой 🙂
