
Продолжение. Начало — Часть1, Часть 2 и Часть 3
В этой части составим пошаговое руководство по запуску системы в ROS
Предполагается, что плата микроконтроллера подсоединена к компу по USB, прибор PSC05 подключен к сети, а через разъем RJ11 к плате микроконтроллера. Микрофон (у меня беспроводной) подключен к компьютеру. На компьютере установлена операционная система linux и установлен фреймворк ROS. Создан проект vp_x10_voice.
Следующие действия производим в терминале (я использую Guake Terinal, позволяющий открывать одно окно со множеством закладок).
Запускаем Guake Terinal
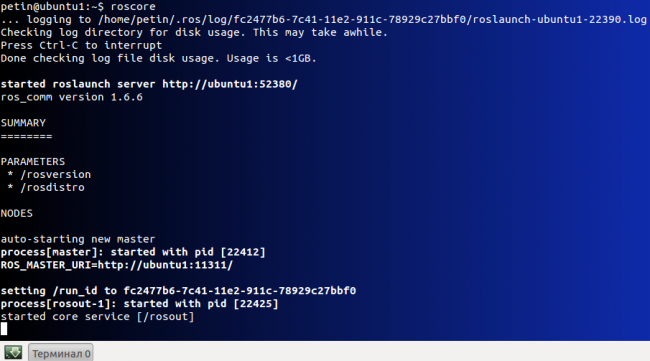
1 вкладка
$ roscore
2 вклавка
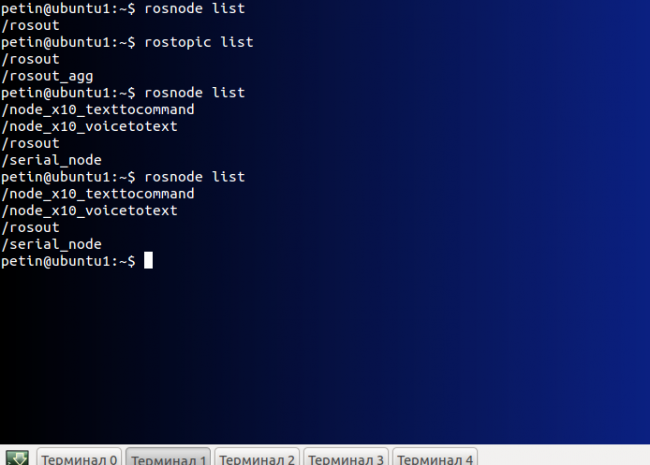
Смотрим список узлов и тем
$ rosnode list $ rostopic list

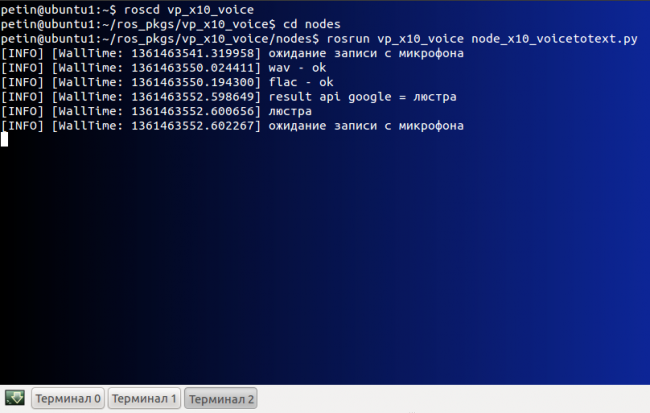
3 вкладка
Запуск узла преобразования голоса в текст и выдача индекса выбранной команды
$ roscd vp_x10_voice $ cd nodes $ rosrun vp_x10_voice node_x10_voicetotext.py
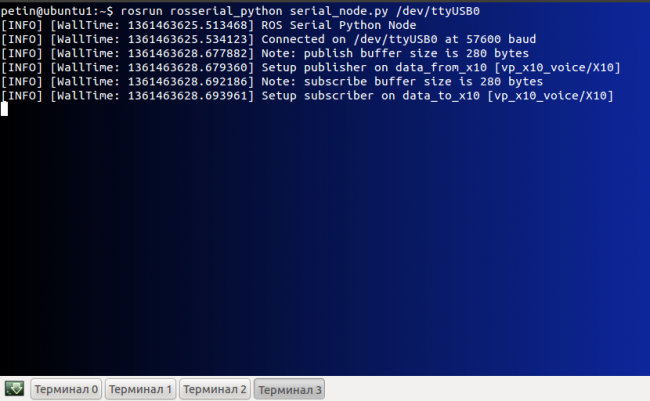
4 вкладка
В ROS создаем узел serial_node.py пакета rosserial_python, который соединяет нашу Arduino платы с остальной частью ROS (необходимо выставить используемый последовательный порт)
$ rosrun rosserial_python serial_node.py /dev/ttyUSB0
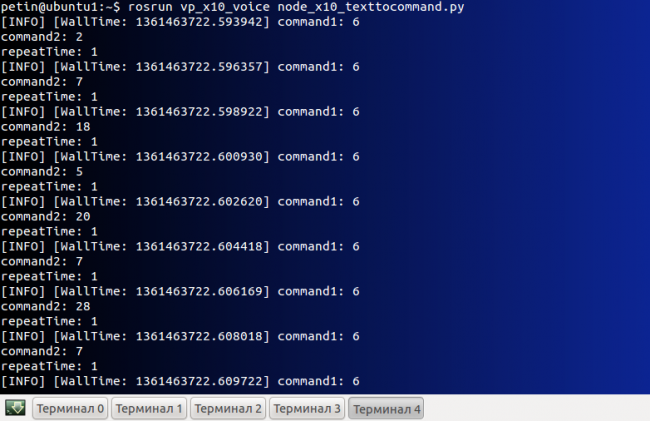
5 вкладка
Запуск узла преобразования индекса выбранной команды в текст
$ rosrun vp_x10_voice node_x10_texttocommand.py
Заходим во вкладку 2 и проверяем список узлов и тем
$ rosnode list $ rostopic list
Теперь произносим голосовые команды и смотрим результат
Далее — Будильник в системе ROS