
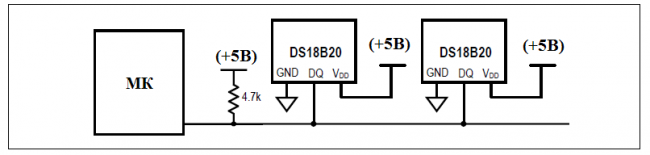
Здравствуйте, подключив 10 датчиков температуры DS18B20 контроллер считывал данные только с трех. Отключив эти три датчика у меня заработали другие 5 шт. Такое чувство что некоторые датчики перебивают сигнал других. В чем проблема, почему они работают не правильно?
Подключал так:
Вот код:
#include <OneWire.h>
OneWire ds(12); // датчики на порте
void setup(void)
{
Serial.begin(9600);
pinMode(9, OUTPUT);
}
void loop(void)
{
byte i;
byte present = 0;
byte data[12];
byte addr[8];
int Temp;
if ( !ds.search(addr))
{
ds.reset_search();
return;
}
Serial.print("R="); //R=28 Not sure what this is
for( i = 0; i < 8; i++) {
Serial.print(addr[i], HEX);
Serial.print(" ");
sensor=sensor+addr[i];
}
if ( OneWire::crc8( addr, 7) != addr[7]) {
Serial.print("CRC is not valid!\n");
return;
}
if ( addr[0] != 0x28) {
Serial.print("Device is not a DS18S20 family device.\n");
return;
}
ds.reset();
ds.select(addr);
ds.write(0x44,1); // start conversion, with parasite power on at the end
delay(5000); // maybe 750ms is enough, maybe not
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
Serial.print("p=");
Serial.print(present,HEX);
Serial.print(" ");
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
Serial.print(data[i], HEX);
Serial.print(" ");
}
Temp=(data[1]<<8)+data[0];//take the two bytes from the response relating to temperature
Temp=Temp;//divide by 16 to get pure celcius readout
Serial.print("T=");//output the temperature to serial port
Serial.print(Temp/16);
Serial.print(".");
Serial.print(((Temp%16)*100)/16);
Serial.print(" ");
Serial.print(" CRC=");
Serial.print( OneWire::crc8( data, 8), HEX);
Serial.println();
}
3 комментария на «“Много датчиков температуры DS18B20”»
Интересно!!! Была потребность опрашивать 2 датчика ds18b20/ нашёл немного другой код в интернете. Выложу. Может и пригодится.
// DS18B20_1 - Arduino // // Continually measures temperatures at three points using the Dallas DS18B20 on three // separate Arduino pins. // // Uses the parasitic power mode // // Displays to a serial LCD operating at 9600 baud. // // Arduino Board DS18B20 // // +5 VDC // | // 4.7K // 8 ---------------- |----- 2 (DQ) Note that terms 1 and 3 are grounded. // // 7 ---- same as above // 6 ---- same as above // // Tx ---------------------------- To Serial LCD (LCD #117) // // copyright, Peter H Anderson, Baltimore, MD, May 5, '07 void setup() { int n, dev_channel[2] = {15, 16}, _1W_Pin; for (n=0; n<2; n++) { _1W_Pin = dev_channel[n]; digitalWrite(_1W_Pin, LOW); pinMode(_1W_Pin, INPUT); } Serial.begin(9600); } void loop() { int n, dev_channel[2] = {15, 16}, _1W_Pin; int HighByte, LowByte, TReading, SignBit, Tc_100, Whole, Fract; for (n=0; n<2; n++) { _1W_Pin = dev_channel[n]; OneWireReset(_1W_Pin); OneWireOutByte(_1W_Pin, 0xcc, 0); OneWireOutByte(_1W_Pin, 0x44, 1); OneWireReset(_1W_Pin); OneWireOutByte(_1W_Pin, 0xcc, 0); OneWireOutByte(_1W_Pin, 0xbe, 0); LowByte = OneWireInByte(_1W_Pin); HighByte = OneWireInByte(_1W_Pin); TReading = (HighByte << 8) + LowByte; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; Serial.print(Whole); Serial.print("."); if (Fract < 10) { Serial.print("0"); } Serial.println(Fract); delay(1000); } } void OneWireReset(int _1W_Pin) { digitalWrite(_1W_Pin, LOW); pinMode(_1W_Pin, OUTPUT); delayMicroseconds(500); pinMode(_1W_Pin, INPUT); delayMicroseconds(500); } void OneWireOutByte(int _1W_Pin, byte d, byte strong) { byte n; for(n=8; n!=0; n--) { if ((d & 0x01) == 1) { digitalWrite(_1W_Pin, LOW); pinMode(_1W_Pin, OUTPUT); delayMicroseconds(5); pinMode(_1W_Pin, INPUT); delayMicroseconds(60); } else { digitalWrite(_1W_Pin, LOW); pinMode(_1W_Pin, OUTPUT); delayMicroseconds(60); pinMode(_1W_Pin, INPUT); } d=d>>1; } if(strong) { digitalWrite(_1W_Pin, HIGH); pinMode(_1W_Pin, OUTPUT); //delay(1000); pinMode(_1W_Pin, INPUT); digitalWrite(_1W_Pin, LOW); } } byte OneWireInByte(int _1W_Pin) { byte d, n, b; for (n=0; n<8; n++) { digitalWrite(_1W_Pin, LOW); pinMode(_1W_Pin, OUTPUT); delayMicroseconds(5); pinMode(_1W_Pin, INPUT); delayMicroseconds(5); b = digitalRead(_1W_Pin); delayMicroseconds(50); d = (d >> 1) | (b<<7); } return(d); }Да, появилось две проблемы я решил разделить на две темы.
Спасибо)) Такой код вообще не встречал…