
В управлении гидропоникой я насчитал 5 независимых процессов:
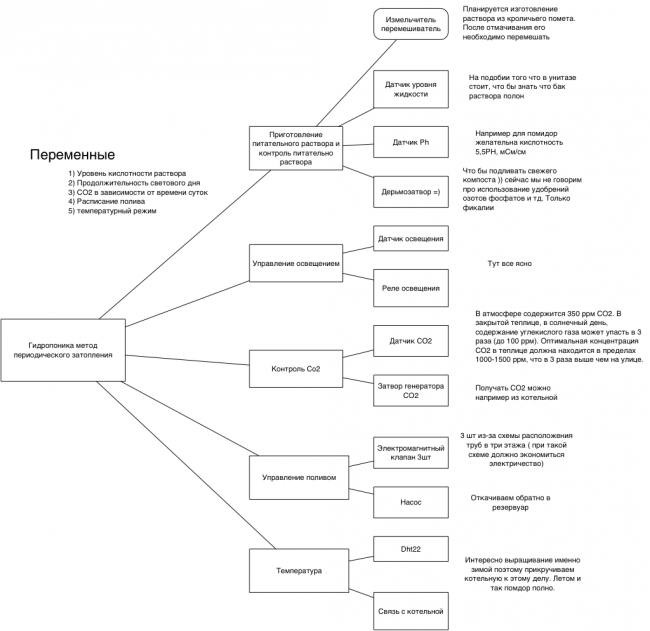
Из первой версии мы выбрасываем: все кроме управления поливом. И потихоньку стремимся к автоматизации всей схемы.
Это мой первый проект по схемотехнике. Некоторые возможно тривиальные задачи мне могут показаться непосильными, но надеюсь добрые люди помогут в комментариях ))
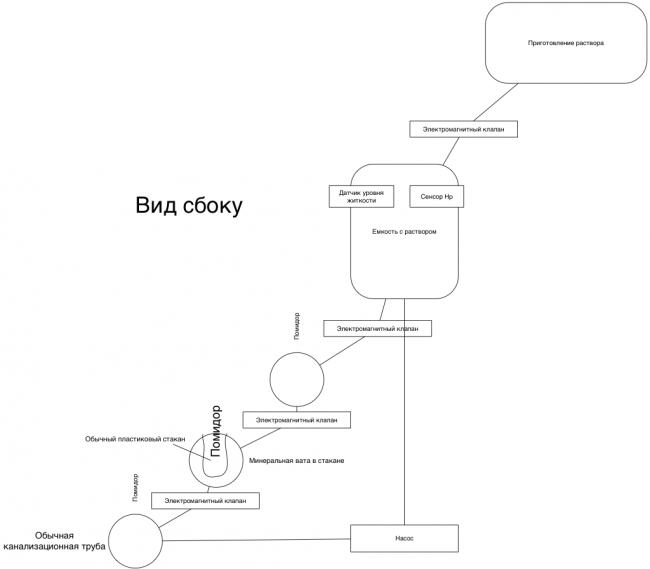
На схеме есть емкость со свежеприготовленным питательным раствором, (самый верхний блок) все начинается с него.
Должен открыться верхний клапан и начать наполнять рабочую емкость с раствором пока не сработает датчик уровня жидкости.
После того как датчик сработал верхний клапан закрывается, теперь мы знаем что емкость полна и готова к использованию.
Объем жидкости в емкости должен быть равен объему одной трубы с рассадой. ( на схеме их три)
Дальше начинает работать расписание полива. Когда приходит время поливать открывается клапан между емкостью и первой трубой.
Засекаем это время и используем его как константу в дальнейшем.
Теперь мы знаем что емкость пуста и заполнена верхняя труба. Через скажем 5 минут клапан между емкостью и верхней трубой закрывается а открывается клапан к следующей трубе. Все повторяется. А из нижней трубы жидкость уже откачивается обратно в емкость, затем смотрится показание датчика уровня жидкости. Если нужно доливаем раствора.
Можно конечно расположить все три трубы на одном уровне и закачивать/выкачивать в них воду. Но положение лесенкой по идее должно экономить электричество. Так как обратно мы поднимаем объем жидкости в три раза меньший. Учитывая что циклов будет ооочень много экономия должна быть заметной.
Управление:
Изначально планировал управлять все с помощью arduino и Ethernet Shield`а. Ethernet Shield что бы отказаться от дисплеев и все смотреть на телефоне через браузер. Ведь задача приезжать в теплицу как можно реже и все контролировать =)
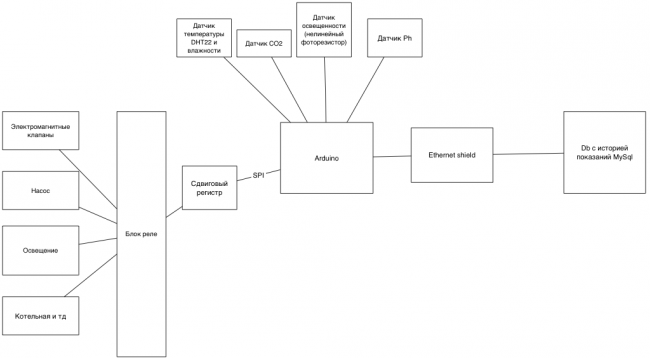
Но меня мучают вопросы а хватит ли у arduino (хотя заказал 32 KB (ATmega328)) памяти что бы обеспечить нужную мне работу? А можно ли будет менять переменные на ходу (изменить время полива и т.д.) ? (см. выше это мой первый проект)
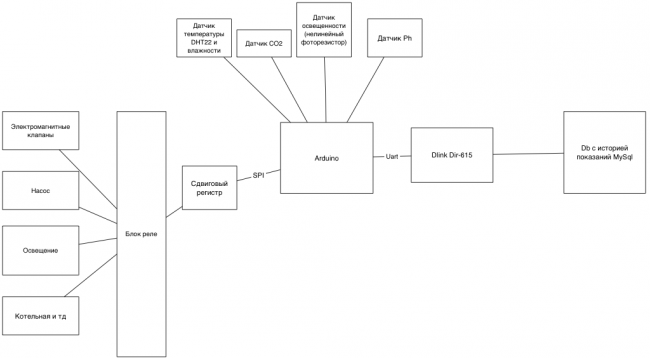
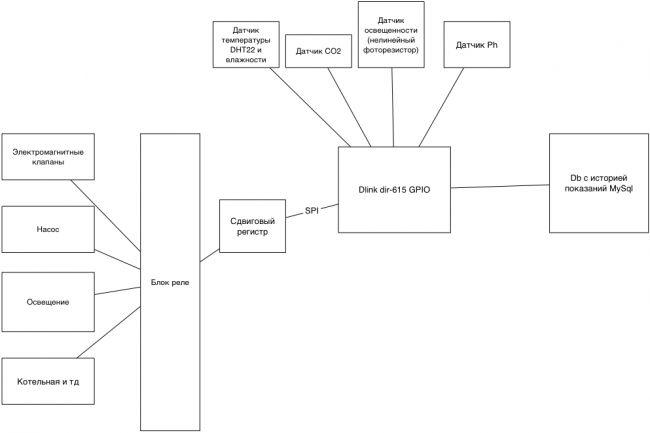
Пришла в голову идея использовать роутер как дополнительные мозги. Dlink dir-615 полноценный linux там уже проще что то менять, всегда можно по ssh подключиться.
Но увидев интересны Led скрипты возник вопрос а нужна ли вообще arduino?
У Dir-615 я насчитал 11 рабочих портов GPIO (всеми ими поморгал)) И это не считая не распаянные порты, которых вроде еще 10 шт.
Может сделать так?
Но тогда стает вопрос подключения датчиков температуры, я не знаю как это делать на GPIO для arduinio есть готовые модули.
Светодиодики действительно моргают, видео прилагаю)) Причем так же работает и кнопка на ввод данных. Нажимаешь 0 отпустил 1 ))
Основные вопросы:
1) как лучше сделать:
а) Arduinio + Ethernet Shield
б) Arduino + router (через uart)
в) Router через GPIO
2) Если роутер через GPIO то как подключить датчики? готовых то библиотек нет..
Реалити шоу создания устройства ))
0 комментариев на «“Гидропоника 2”»
думаю, самым лучшим вариантом будет использовать связку из роутера и Arduino
Доброго времени суток. Слежу за твоей темой — так как сам подсел на гидропонику. Начал эксперимент с перевода домашних цветов на пассивную гидропонику. Сейчас тоже разрабатываю установку на базе ардуино.
Так вот, хочу сделать тебе пару замечаний:
1. ни в коем случае нельза доливать приготовленный раствор в тот который у тебя в поливе. Разбалансируешь раствор и все пойдет пухом прахом. Если не имеется датчиков способных определить содержание того или иного питательного вещества в растворе, то раствор тупо меняется каждые например 2е недели. Это факт обязательный — можешь перекормить растение тем или иным минералом, если будешь добавлять приготовленный заного раствор к рабочему раствору.
2. Ты делаешь пирамиду, как я понял, первая труба сливает во вторую, вторая в третью, таким образом у тебя получается поочередное затопление, зачем тебе перекачивать потом в емкость а из нее в первую трубу. Сделай проще — либо добавь еще одну трубу ниже уровнем, и в нее просто сливай через клапан, но тут я думаю и у тебя возникнет желание использовать ее как посадочное место. Тут я бы предложил — гибридную схему переодического затопления, т.е. у тя три трубы, работают они так: напонилась 1 слилось из 1 во 2, затем со 2 в 3, затем качаем половину 3 в 1, через паузу докачиваем 1 до полного, а дальше сливаем по циклу. таким образом у тебя будет экономичный круг полива. И нет, это не скажется на 1м резервуаре из за того что он будет частично заполнен, ты просто в период затопления 2го добавляешь ему время на питание. А чтобы сильно не затопить растение субстрат строго из керамзита.
1) А вот этого не знал. Нужно будет подробнее про это почитать. Значит в первой законченной версии будем просто менять раствор. спасибо за замечание.
2) Да именно пирамида, я когда пост готовил неправильно воспользовался
Интересное решение оставлять наполовину затопленные трубы, но тут сложность в контроле уровня как определить что заполнена половина трубы. Ставить в трубу датчики дорого и неудобно. Раствор же в любом случае наверх перекачивать, можно в дополнительную емкость.
Сейчас собрал одну трубу. Взял 2м канализационную 100мм ( 200рублей ), заглушка 25 (руб), переходник на 50мм 25(руб) для слива, три пластиковых крепежа по 25руб. Это в первом попавшемся строительном магазине. В трубе через каждые 40см сделал отверстия под большой пластиковый стакан 0,5л. Подходит очень хорошо достает до самого дна. В стаканах паяльником наделал дырок.
Затеял это так как интересно и есть простаивающее помещение 100м2+100м2 в котором зимой можно что то выращивать))
Arduino еще не пришла, поэтому я пока что распаял GPIO на роутере, он справляется с управлением через sh скрипты.
В качестве субстракта я планировал использовать минеральную вату. Хотя в начале лучше попробовать сделать одну с ватой другую с керамзитом и посмотреть где будет лучше.
Да впринципе можно и бак зарядить сверху всей системы, но как мне кажется это все таки лишние затраты ресурсов, но вот если ты туда запихнешь еще компрессор воздушный — чтоб он еще и раствор насыщал кислородом, то думаю будет оправдано. Не стоит стаканы ставить на дно — излишняя влага будет задерживаться, но тут тоже зависит от субстрата.
Если использовать вату то тут лучше (говорят) капельный полив, хотя вот чисто мое мнение с использованием ваты можно увеличить промежуток между затоплениями, соответственно экономия энергии, и шумов меньше, тут надо пробовать. Я пока помидор посадил в кокосовое волокно — зделал своего рода патрончик. потом когда укоренится, я просто этот патрончик облажу керомзитом.
Кстати по поводу уровня — датчик ни какой покупать не нужно. Вопрос решается либо механически либо двумя металлическими штырями и к дуине. Емкость заполняется до уровня штырьков и замыкает их, значит все ок половина обеспечена
Опередил=)
Было и .
— вот может пригодится, это пока мои задумки на будущее. Можешь переработать под себя задумку.
А зачем еще соединения между трубами? Между верхней и нижней и между средней и нижней. Разве просто клапанов не достаточно?
Про воздух точно подмечено обогащать нужно, нужно будет это предусмотреть.
Да штырями можно, но опять же ноги + доп логика пока что остановлюсь на варианте с доп емкостью, дальше будет видно. Кстати нужно будет попробовать штырями в основной емкости.
Эти трубы реализуют слив избытка, т.е. когда раствор достигает определенного уровня — его излишек тупо сливается вниз и опять закачивается, это больше даже защита от создающейся волны, чтоб через края не било.
Про воздух, компрессор и насос(ы) для перекачки.
Как старый аквариумист могу подкинуть идею как совместить приятное с необходимым=)
Если не нужна очень большая скорость заполнения/перекачивания то можно использовать и обойтись без насоса — только комрессор.
Хех, прикольно, остается только от шумов (хлюпанья) избавиться)) А так то забавная идея
оно не хлюпает — только оч. тихо булькает и если есть падающая струя — мелодично журчит=D
вот например
помоему большая часть звука- работающий аквариумный компрессор
А медленно насколько медленно? Нужно заполнять трубу примерно раз в 3000секунд на 60 секунд. т.е. за 3000 секунд раствор должен полностью перекачиваться в верхний резервуар. А это где то 15 литров. При диаметре 5см. (пR^2*L) 3,14*5^2 * 200 = 15,6 литра.
За час-то?
Думаю вполне.
Я этим методом только воду из аквариума в фильтр выносной подавал, а народ умудряется и рыбу из сети промысловой на борт откачивать 0_о
Дело в размере и давлении воздуха(у меня довольно бодро циркулировала от старинного аквариумного компрессора). Нужны или экскременты.
Берёте шланг, опускаете в ведро, поглубже, снизу в шланг заводите трубочку с распылителем от аквариумного компрессора и дуем в другой конец. Желательно не ртом=), а если ртом то не через аквариумный распылитель, а то башка быстро разболится=) Но пузырьки должны быть не крупными.
Кстати, гуглопоиск по запросу эрлифт второй строчкой выдаёт. Там в первом посте всё отлично расписано=)
хммм. Скорость заполнения на самом деле не так важна. Тут опять же все зависит от субстрата. У меня цикл в моем мини мировом потопе — 15 минут затопление — 3 раза за 12 часов — чаще растение задыхается, реже подсыхает. Но у меня субстрат — внутри патрон кокосового волокна (он хорошо держит воду) а вокруг него керамзит. При другом раскладе все по другому. Время заполнения 2,5 минуты, объем резервуара 2 л, слив в течении 5 минут. Я потом фотку выложу че у меня за аппаратик. Из автоматизации пока только таймер на ардуине. Щас мне важно разобраться на практике со всеми нюансами, чтобы потом уже что то мудрить с автономностью.
ну если скорость не важна — тогда вообще сам бог велел эрлифтом качать, особенно если всё равно воздухом насыщать надо.
Дёшево и сердито=)
А на какую высоту можно эрлифтом поднять? Там высота порядка метра получается
эээ… тут чуть хуже.
Это дело эффективно при соотношении высота подъёма к высоте погружения =0,8-1.
То есть хорошо поднимает приблизительно на столько же на столько погружена труба.
Но тут можно выйти из положения развернув вашу систему — в ваших схемах, я так понял, затопление идёт самотёком, а осушение насосом, можно ведь и наоборот.
Высокий бак внизу, из него качаем в трубу с рассадой находящуюся выше, потом всё это каскадом вниз течёт самостоятельно, через клапана.
Помидороносные трубы выйдут как раз повыше(можно на уровне рук) — удобнее будет обслуживать, и урожай жрать не нагибаясь=)
М?
Вобщем и целом стоит резюмировать, что товарищ Zoltberg привнес нечто новое, теперь только практика покажет.
Да надо попробовать в любом, случае. Прикольно же)
Если наоборот делать тогда время перекачивания сокращается до времени затопления. то есть раз в 3000 секунд закачивать жидкость на 60 секунд (из нижнего бака выкачать в верхнюю трубу за 60 секунд), а не закачивать 3000 секунд и некачать 60 секунд (из нижней трубы, даже наверно из нижнего резервуара. потихоньку выкачивать в верхний что бы потом слить самотеком за 60 секунд.)
Это фатально?
Скорость слива можно снизить, изменив диаметр трубки, или поставить шаровый кран которым отрегулировать скорость слива.
Можно и на ходу регулировать, например сервой открывая-закрывая такой же шаровый кран на побольше/поменьше, тогда и клапан не нужен=)