
![]()
При конструировании робота на базе конструктора Makeblock, возникла необходимость оснастить робота бампером с датчиками.
Бампер — очень полезный и простой датчик. Не напрасно, одни из самых распространённых на сегодня — роботы-пылесосы оборудованы аналогичными бамперами — они проще и надёжнее позволяют узнать, что робот упёрся в какое-либо препятствие.
Использование УЗ— и ИК— дальномеров позволяют дополнить работу бампера, но им присущи свои недостатки — узкая диаграмма направленности, зашумлённость показаний, а в случае ИК-датчиков ещё и неоднозначность показаний в случае выхода объекта за диапазон действия.
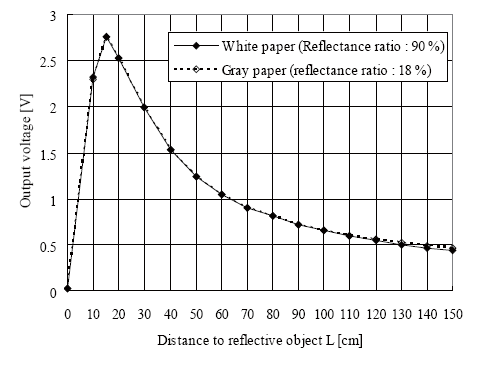
Так, например, ИК-дальномер Sharp GP2Y0A41SK0F имеет диапазон 4-30 см, а значит при приближении объекта ближе 4 см — начинает показывать, что объект находится дальше, чем есть на самом деле.
График нелинейного выхода датчика для датчик измерения расстояния SHARP-GP2Y0A02YK0F:
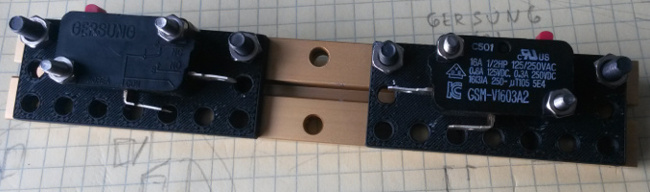
Для изготовление бампера, я нашёл пару нормальноразомкнутых микропереключателей Gersung GSM-V1603A2, выдранные из обычной микроволновки (в микроволновых печах находится 3 микропереключателя — два нормальноразомкнутых и один нормальнозамкнутый — они переключаются «рогами» фиксатора двери и обеспечивают безопасное отключение цепи питания магнетрона).
Кнопки можно заменить на более надёжные фотоинтерапторы на просвет.
Для крепления переключателей к балке Makeblock 0824-144, распечатано два держателя (gersung_switch_holder_v2.stl).
Сам бампер, из-за своего большого размера, пришлось вырезать из вспененного ПВХ (крепится парой болтов к напечатанной Makeblock пластине (2х10) и несколько модифицированному распечатанному Makeblock bracket (1×2) — mkb_bracket_bumper).
Чтобы бампер не проворачивался на одной точке крепления — пришлось добавить пару упоров — mkb_screw_16 (на которые удачно наделись пружинки).
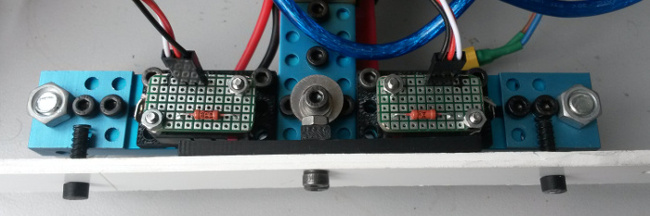
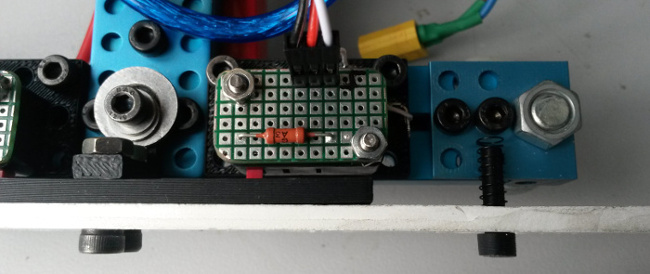
Схема подключения переключателя к CraftDuino — обычное подключение кнопки к цифровому входу (через резистор 10k).
Сделал в виде кусочка макетной платы с выходом на три пина (стандартное: Сигнал — Vcc — GND).
Ссылки
MakeBlock bracket and plate
Gersung switch holder for MakeBlock — shorter versions
По теме
Практическое программирование Arduino/CraftDuino — цифровой ввод — кнопка
Датчик измерения расстояния SHARP-GP2Y0A02YK0F
Крепление инфракрасного сенсора Sharp к конструктору MakeBlock с использованием 3D-печати
0 комментариев на «“Изготовление бампера для робота на базе Makeblock”»
А он сработает при лобовом столкновении с препятствием? У него ведь только одна точка вращения (та что с шайбой, если я правильно понял), или он вообще не вращается, а на переключатели давит только за счет прогиба пластины? Шляпки болтов не цепляются за всё подряд?
Срабатывает 🙂 Всё верно — тот что с шайбой, но там не только вращение, но и продольное перемещение (см. ).
Шапки болтов не цепляются, но да — нужно будет заменить их на болты с потайной головкой 🙂
Продолжил