

Чтобы получить круговую панораму, Katherine Scott использовала: одноплатный компьютер Raspberry Pi с модулем камеры и панорамную линзу для iPhon-а.
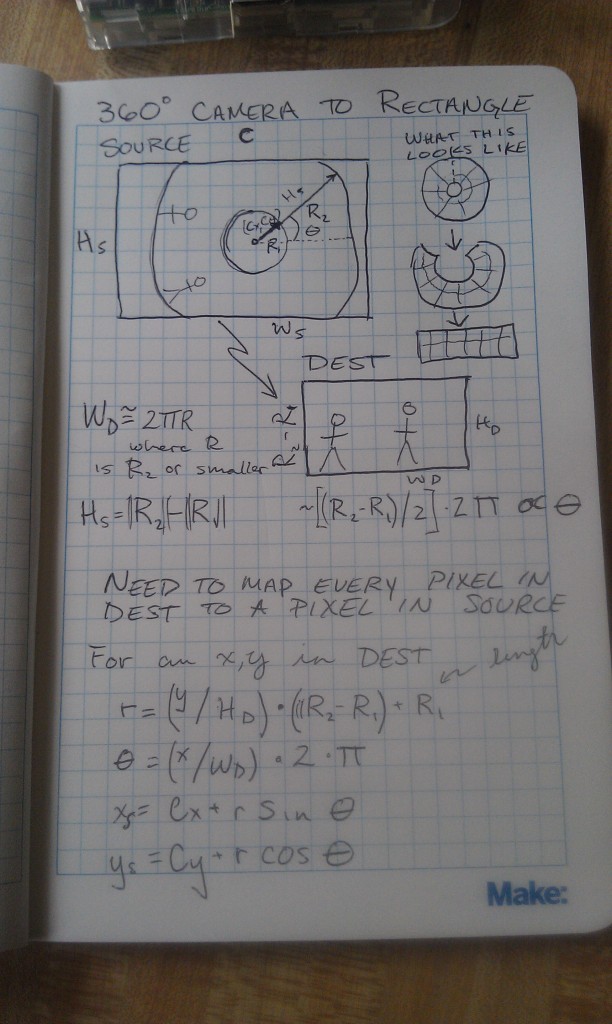
Однако, получаемое изображение слишком искажено:
— поэтому его нужно «развернуть» к нормальному виду.
Формулы для пересчёта пикселей получаемой круговой панорамы:
видео работы:
Код:
from SimpleCV import Camera, VideoStream, Color, Display, Image, VirtualCamera
import cv2
import numpy as np
import time
# build the mapping
def buildMap(Ws,Hs,Wd,Hd,R1,R2,Cx,Cy):
map_x = np.zeros((Hd,Wd),np.float32)
map_y = np.zeros((Hd,Wd),np.float32)
for y in range(0,int(Hd-1)):
for x in range(0,int(Wd-1)):
r = (float(y)/float(Hd))*(R2-R1)+R1
theta = (float(x)/float(Wd))*2.0*np.pi
xS = Cx+r*np.sin(theta)
yS = Cy+r*np.cos(theta)
map_x.itemset((y,x),int(xS))
map_y.itemset((y,x),int(yS))
return map_x, map_y
# do the unwarping
def unwarp(img,xmap,ymap):
output = cv2.remap(img.getNumpyCv2(),xmap,ymap,cv2.INTER_LINEAR)
result = Image(output,cv2image=True)
return result
disp = Display((800,600))
vals = []
last = (0,0)
# Load the video from the rpi
vc = VirtualCamera("video.h264","video")
# Sometimes there is crud at the begining, buffer it out
for i in range(0,10):
img = vc.getImage()
img.save(disp)
# Show the user a frame let them left click the center
# of the "donut" and the right inner and outer edge
# in that order. Press esc to exit the display
while not disp.isDone():
test = disp.leftButtonDownPosition()
if( test != last and test is not None):
last = test
vals.append(test)
# 0 = xc yc
# 1 = r1
# 2 = r2
# center of the "donut"
Cx = vals[0][0]
Cy = vals[0][1]
# Inner donut radius
R1x = vals[1][0]
R1y = vals[1][1]
R1 = R1x-Cx
# outer donut radius
R2x = vals[2][0]
R2y = vals[2][1]
R2 = R2x-Cx
# our input and output image siZes
Wd = 2.0*((R2+R1)/2)*np.pi
Hd = (R2-R1)
Ws = img.width
Hs = img.height
# build the pixel map, this could be sped up
print "BUILDING MAP!"
xmap,ymap = buildMap(Ws,Hs,Wd,Hd,R1,R2,Cx,Cy)
print "MAP DONE!"
# do an unwarping and show it to us
result = unwarp(img,xmap,ymap)
result.save(disp)
# SimpleCV/OpenCV video out was giving problems
# decided to output frames and convert using
# avconv / ffmpeg.
# I used these params for converting the raw frames to video
# avconv -f image2 -r 30 -v:b 1024K -i samples/lapinsnipermin/%03d.jpeg output.mpeg
i = 0
while img is not None:
result = unwarp(img,xmap,ymap)
# Once we get an image overlay it on the source
derp = img.blit(result,(0,img.height-result.height))
derp = derp.applyLayers()
derp.save(disp)
fname = "FRAME{num:05d}.png".format(num=i)
derp.save(fname)
#vs.writeFrame(derp)
# get the next frame
img = vc.getImage()
i = i + 1
Ссылки
Dewarped Panoramic Images From A RaspberryPi Camera Module

0 комментариев на «“Получение круговой панорамы на Raspberry Pi”»
Напишите кто нибудь умный пару статеек про SimplyCV