
 Давно уже мы ломали голову как порадовать общественность (и себя=) доступным и качественным движителем для роботов. Ничего не выходило — готовые компоненты — слишком дорого, заказывать производство — тоже не бюджетно выходило, самим делать из не предназначенных для этого деталей — получается жуткий колхоз.
Давно уже мы ломали голову как порадовать общественность (и себя=) доступным и качественным движителем для роботов. Ничего не выходило — готовые компоненты — слишком дорого, заказывать производство — тоже не бюджетно выходило, самим делать из не предназначенных для этого деталей — получается жуткий колхоз.
И вот после долгой и безуспешной борьбы с сервами, стеклоподъёмниками, шуруповёртами, колёсами от роликовых коньков, мебели и ещё чёрт знает от чего, когда мы уже сдались — закупили дорогие мотор-редукторы, крепёж и колёса…Совершенно неожидано, братья-коммунисты решили проблему с перевыполнением плана=)
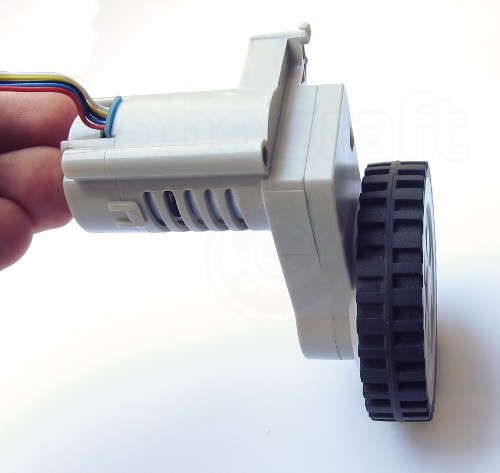
Встречайте — колёсный узел от китайского робота-пылесоса!
Это законченный агрегат с 12 вольтовым мотором, металлическим редуктором, энкодером, с симпатичным колесом в цепкой резиновой покрышке, с подвеской и датчиком отрыва от пола! Причём всё это весьма приличного качества.
Ниже всё подробно, с разборкой и большим количеством фоток.
Есть колёса левые и правые — отличаются зеркально. Далее рассматривать будем левое
Разглядим внешне:
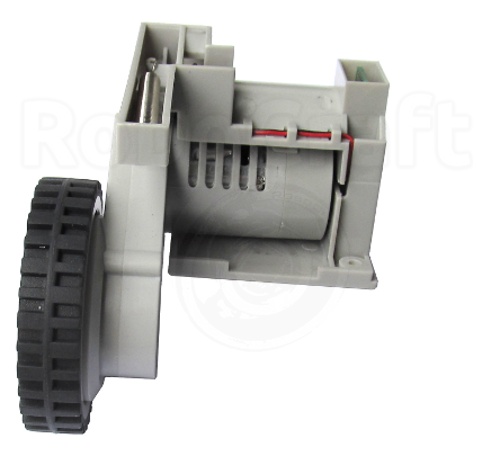



Состоит агрегат из двух частей — «мотоблока» (двигатель-редуктор-колесо)и «корпуса» в котором всё это подвешено и закреплён разъём.
Мотоблок качается на оси закреплённой в «корпусе» так, что колесо ходит вверх-вниз. В свободном состоянии пружина в верхней части корпуса сжата и оттопыривает мотоблок создавая максимальный «клиренс» — 33мм.
Если на корпус нажать то пружина сжимается — получается своего рода подвеска=)
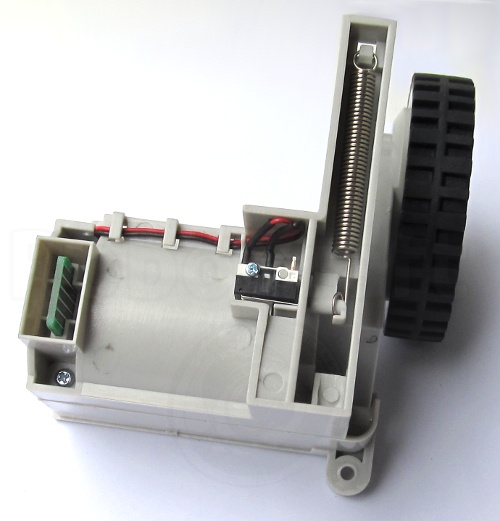
Растягивается полностью пружина под весом 1.2кг и тогда просвет становится 13мм. Для не слишком тяжёлых роботов — сойдёт за подвеску для езды по коврам и порожкам.
При полностью оттопыренном колесе — замыкается микрик в верхней части корпуса — датчик отрыва от пола.
Так что можно выключать дисковые пилы своего робота-убийцы когда его поднимают(или наоборот включать…). А можно сделать чтобы он орал дурным голосом требуя вернуть его на землю =)
Снаружи всё ясно, начнём ковырять! Первым делом снимаем заглушки колпаки с колёсных болтов.
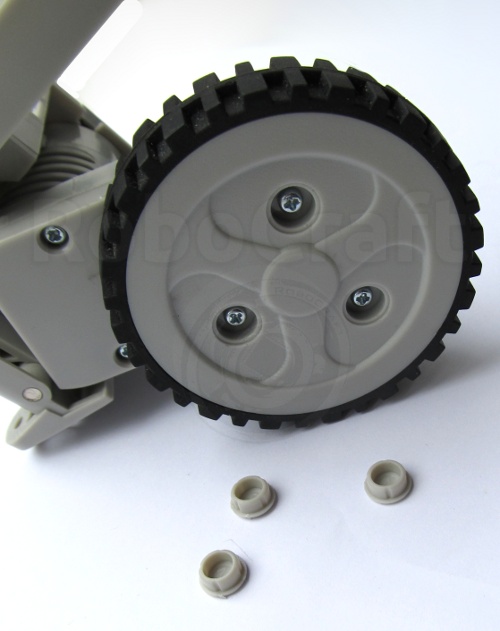
Очень меня повеселила такая обстоятельная конструкция колеса=)Дальше больше!
Крутим три винта обнаруживаем, что диски у нас не просто литьё, а ещё и разборные:

Резина низкопрофильная, мягкая, а чтоб не проворачивалась на дисках — сидит на «штифтах»

Вывинчиваем ещё три винта, снимаем вторую часть диска и видим что проворот на оси колесу не угрожает — держится оно не только на винтах но ещё и на массивных выступах стальной ступицы.
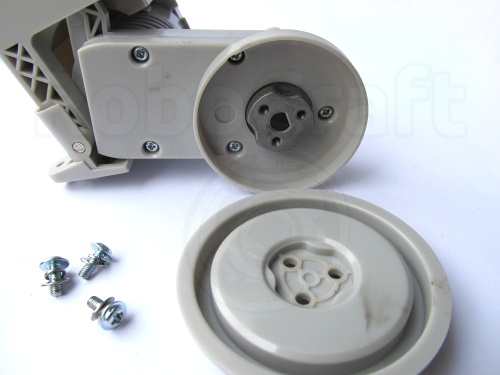
Не китайский запас прочности=)
Снимаем крышку редуктора и опять удивляемся — пластиковые шестерёнки не высыпаются на стол, отнюдь!
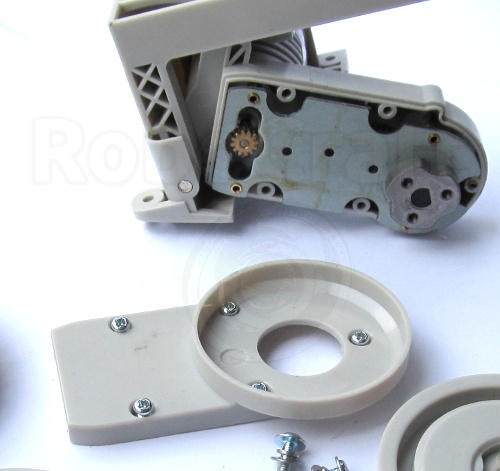
Там опять всё из металла и пластмассой только прикрыто=)
Редуктор не разборный — заклёпан между двумя толстыми стальными пластинами и надёжно прикручен к металлическому корпусу двигателя.

Всё обстоятельно, капитально и аккуратно — наверно делали пленные немцы…
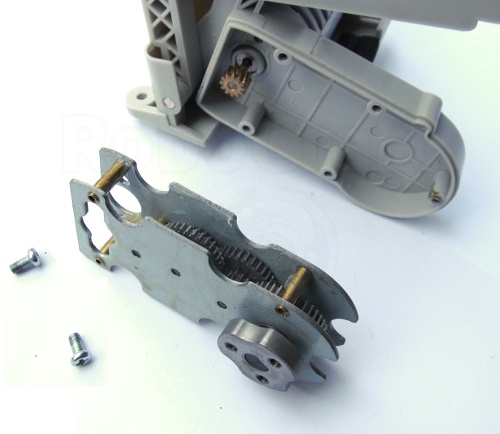
У редуктора только одна шестерня пластиковая — вторая (на самом моторе — латунная) — наверно для демпфирования, в сервах такое, говорят, встречается.
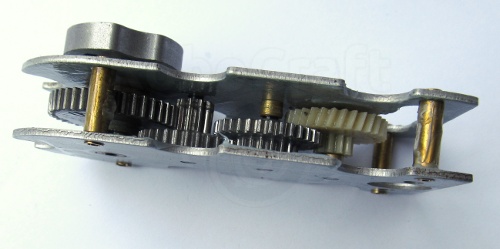
Выходная шестерня со ступицей сидит вот в таких массивных бронзовых втулках
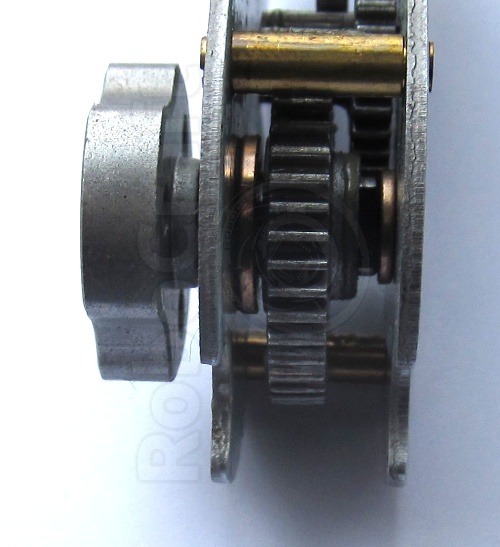
Хотелось бы шариковые подшипники но это было бы уже слишком=)
Так, с редуктором разобрались, приятно поудивлялись, полезем дальше.
Нужно разнять «мотоблок» и «корпус» — «располовинить»=)
Это оказалось весьма непросто — ось запрессована очень туго — пришлось жестоко выбивать, на удивление без последствий. Так же надо вывернуть два винта по бокам от разъёма и аккуратно снять пружину

Корпус разнимается на верхнюю и нижнюю половины.
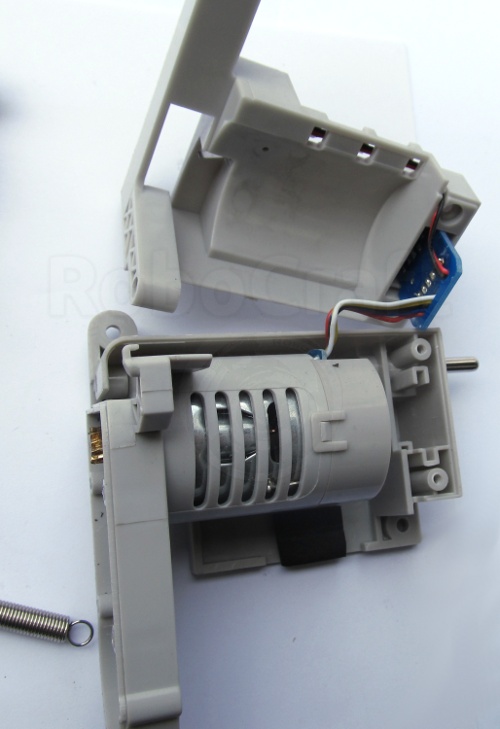
Виден крючок для пружины на мотоблоке и пазы для платы разъёма в нижней части корпуса.
Никакого термоклея и стяжек — даже провод от микрика проложен в специальном канале=)
Если поднатужиться и выбить-вытянуть ось ещё дальше — можно отделить мотоблок от корпуса.
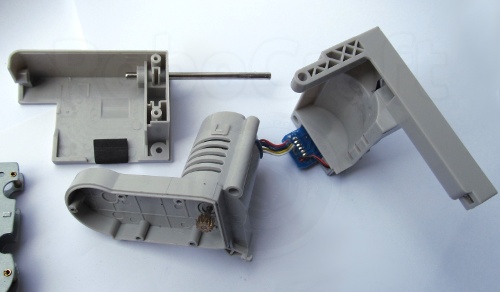
Провода к разъёму не ахти какие гибкие и наверное могут со временем поломаться, если активно использовать подвеску — время покажет.
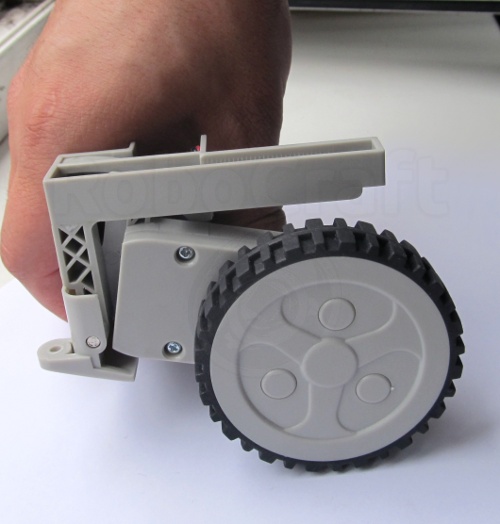
Кстати, со снятым корпусом открывается ещё одна замечательная возможность использования этого агрегата.
Кого смущает низкая посадка колёсного узла в сборе, могут его закрепить вот в таком виде
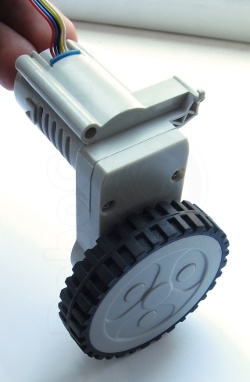
Можно сделать как здесь.
Ковыряем дальше мотоблок.
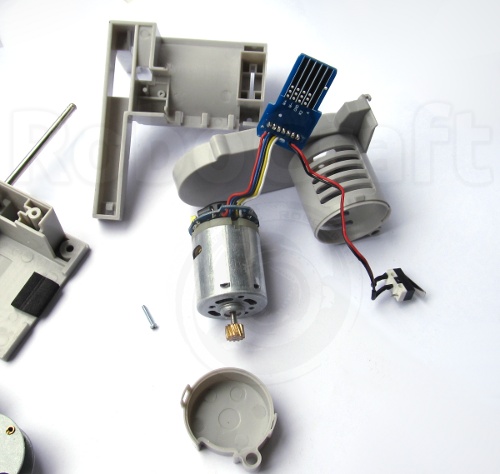
Снимаем заднюю крышку и видим энкодер

стянем кодирующий диск (16 просветов)

под ним обнаруживается оптика и недурственный фильтр

Отпаяем плату и удивимся ещё раз — фильтрец полнейший!

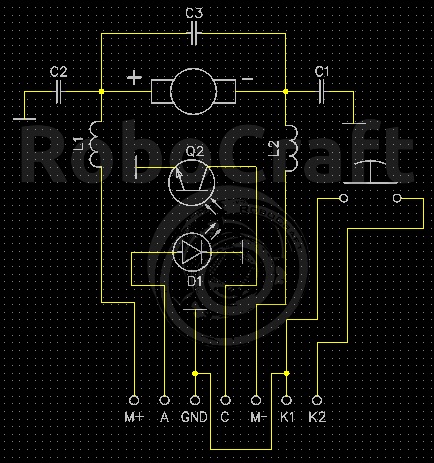
кстати вот схема этой платы — обозначены провода приходящие на плату разъёма
Двигатель снабжён честными медно-угольными щётками (а не трёт по коллектору латунными лепестками, как бывает в дешёвых движках)

Мотоблок в полном разборе
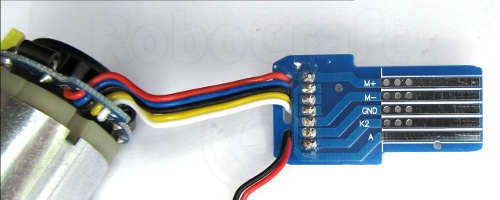
Плата-разъём, контакты «желтого металла», всё подписано=)
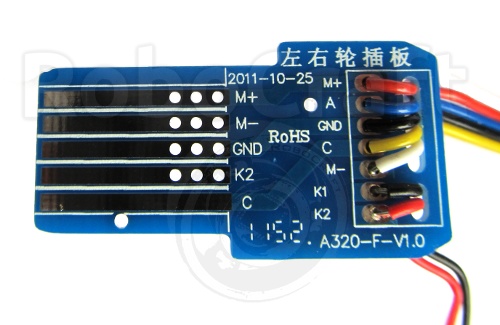
Обратите внимание, что на плате разъёма один из выводов микрика-датчика отрыва соединён с землёй(см схему)
Распиновка:
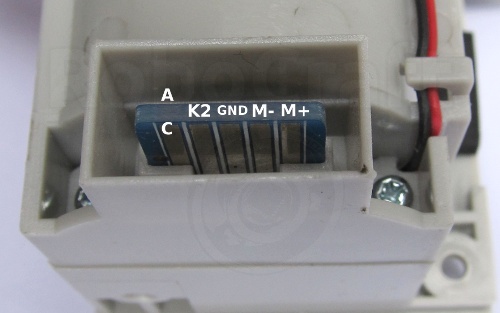
Пока мы в поисках правильной ответной части на этот разъём, замечу что шаг у него 2.54
и на него прекрасно напаивается кусочек PLD-шки (5х2). Совершенно без разборки, для удобства можно срезать часть пластмассы

Эстеты впоследствии могут стянуть пластмаску с PLD-шки натянуть туда пластмаску от IDC10-MS

В общем вот такая вот загагулина.
Работает негромко, резина тянет прилично. Крутится колесо начинает от 3В но тормозиться при этом слишком легко, при 12В на холостых вертится ~90об/мин и тормозиться рукой с ощутимым трудом.
Зато измерили момент — при 12В поднимает до 1.7кг вертикально(на колесо намотана верёвка с подвешенным грузом.) Тесть крутящий момент на валу приблизительно 6кгсм(диаметр колеса 68мм).
Как всё это выглядит в динамике:
Сколхозили за 15минут телегу — скорость проверить. Просто батарея на моторы.
http://www.youtube.com/watch?v=6uPWWNo3tQI
Скорость ползания с грузом в 3,8кг на 12В вышла около 0,29м/с.
Резюмируем:
- Двигатель — коллекторный постоянного тока
- Напряжение питания 12В (видимо)
- Ток ХХ 60мА (при 12В)
- Ток заторможенного 1,05А (при 12В)
- Редуктор — металлический
- Подшипники выходного вала — два, скольжения.
- Передаточное отношение ~1/63
- Обороты ХХ (на выходном валу редуктора) 90об/мин
- Момент (на выходном валу редуктора) 6кгс*см
- Энкодер — оптический, инкрементальный, одиночный, «на просвет»
- за оборот двигателя — 16 импульсов
- за оборот колеса — 1000 импульсов
- Резиновая покрышка
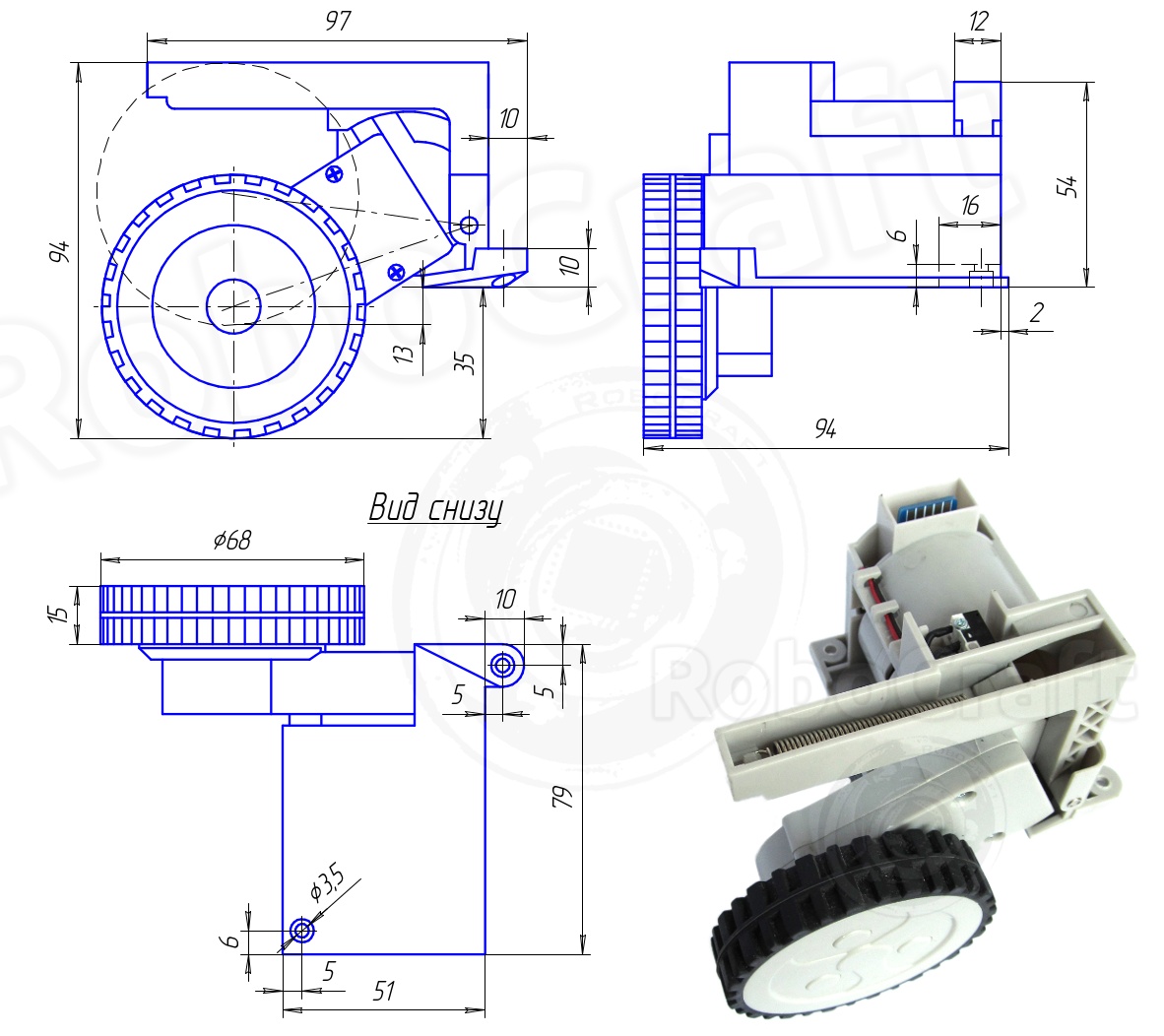
- Диаметр колеса 68мм
- Ширина 15мм
- «Подвеска» — качающаяся, пружина на растяжение
- клиренс 13-33мм
- выжимается при 1,2кг на колесо
- Датчик поднятия(отрыва от пола) — микровыключатель
-
Вес 243гр
- Размеры(габаритные с отпущенным колесом) 110х93х92мм
А на закуску — чертёж
Ну и наконец — купить это чудо восточной мысли и инженерии можно в нашем магазине.
0 комментариев на «“Забористые колёса”»
Спасибо за отличный обзор!
Сколько стоит такое удовольствие и где можно раздобыть?
=)
Где ж вы месяц назад то были?..
🙂
Года 2 назад рассматривал подобный вариант в одном из проектов.
Мне показалось что беда они неспешные, получалось не более 10-12 метров в минуту.
Для данного колеса периметр примерно 0,213м.
Соответственно скорость 90 RPM, это 19м в минуту. Как то с трудом верится.
Тупо батарея на колёса из обзора.
Вес телеги — 3,8кг
Батарея — 11,5В (подсевшая)
Белые метки — через 1 метр
Проход «трассы» (2м) приблизительно за 7сек, тоесть 0,29м/с.
это для холостого хода.
В нагруженном состоянии вышло — 17,4 метра в минуту. По-моему для не гоночного робота вполне достаточно.
Инфу и видео добавил в обзор.
Это очень и очень хороший результат для домашнего не спортивного робота!
А исходные названия и производителя Вы не говорите? 🙂
а в гугле поискать вам религия не позволяет?
Ссылка не вставилась
Нравится, хорошая штука. Да и цена тоже приемлема. Возьму ка на заметку
Пришли мне такие колеса. А еще бы найти шлейф к ним — где искать не нашли?
И можно выложить примеры скетчей и схему подключения к ардуинам.
Шлейф, можно от флопика или CD-ROM-а (IDE-шного), а разёмы от старых материнок — отпаять и отпилить кусок — слота припаять к нему шлейф. Ещё какие-то древние, то ли жёсткие, то ли флоповоды, были на таких шлейфах (у них из зада не разъём торчал, а часть платы на каторую разъём шлейфа натягивался), давно на глаза не попадались, но там тоже пилить надо будет.
Подключать через или .
Про то же было.
Моторшилд есть. Можно ли указать какие пины разъема куда подключать. Пока не нашел разъема пытался подать с батереек 5В на землю и М+: не закрутились колеса.
Хм… подавать надо на «M+» и «M-», собственно туда и подключать мотршилд.
В статье есть схема 😉
Все спасибо разобрался. Разъема не нашел. Буду делать из ПКЛ. 🙂
Подскажите, какое напряжение подавать на диод энкодера?
Напряжение любое — главное ток ограничит на уровне 20мА (а лучше поменьше).
Если подавать 5В то резистор ставить ~300-400ом
Спасибо, но успел спалить. В итоге подключил с помощью вот такого модуля Optical Sensor for Arduino Speed Count (ищем на ибее), выпаяв из него оптопару, и установив ее на плату двигателя, взамен сгоревшей.
Добрый день!
Купил такие колеса, а они вращаются с разной скоростью, робота уводит в сторону.
Подключил энкодеры к ардуино они показывают разные значения оборотов.
Подскажите пожалуйста алгоритм выравнивания скорости моторов, а то я уже всю голову сломал и ни чего не получается, робота уводит в сторону.
Заранее благодарю!
Все моторы(и мотор-редукторы)даже из одной партии, (кроме специально подобранных) имеют разброс скорости вращения, это нормально.
Собственно для этого(в том числе) и ставят энкодеры.
Алгоритмы — ПИД(PID)-регуляторы, ПИ-регуляторы.
Разобрал их на одном моторе стоит латунная шестеренка, на другом пластиковая.
И сами моторы в одну сторону вращаются с одной скоростью, а в другую с другой и скорости моторов постоянно пляшут, то меньше, то больше, хотя подключил их через стабилизатор.
Хм…
Возможно брак, можем предложить заменить.
PS: на днях поразбираю несколько колёс, посмотрю может в этой партии есть отличия от описанного в статье.
Не надо менять, попробую програмно выравнять скорости моторов. А насчет шестеренок просто проверьте, на левом стоит латунная, а на правом пластиковая, но по зубъям и по размеру они одинаковые.
А нестабильность скорости вылечил, просто погонял моторы по часу в одну и в другую сторону, щетки видимо притерлись, и стало более менее стабильно.