
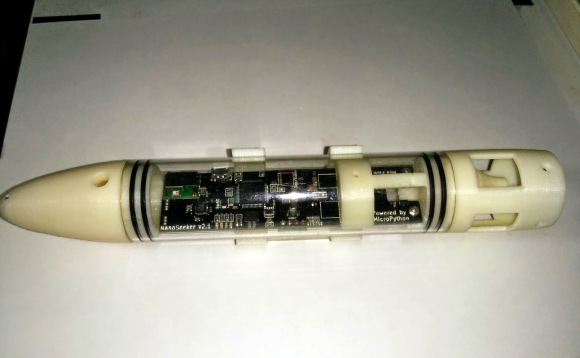
Интересный проект микро- подводного аппарата (Underwater Vehicle) в форм-факторе торпеды.
Плата управления работает на STM32F4, под управлением MicroPython.
Видео испытаний:
Ссылки
NanoSeeker v2.1 Populated Board
http://micropython.org
NanoSeeker Micro AUV
0 комментариев на «“NanoSeeker — микро- подводный аппарат”»
А для чего он нужен?
Помнится, лет 7-8 назад читал на одном дигерском форуме длиннющий тред, в котором как раз пытались соорудить что-то подобное для исследования подтопленых подземных сооружений. Тогда это, правда, ничем не кончилось из-за отсутствия в сообществе хоть одного действующего радиогубителя. Но интерес был весьма серьёзным.
И ваще это круто же 8)