

Ollie — открытый (open source) проект автономного рободирижабля.
Демонстрационное видео:
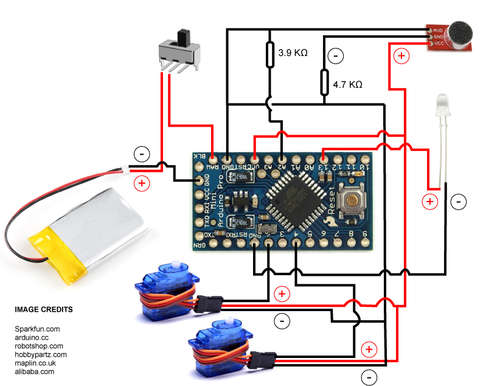
Для проекта используются:
* Arduino Pro Mini
* электронный микрофон
* литий-ионная батарея 900 мАч
* 2 Микро-сервомашинки ( 3,6г)
* Метровый майларовый (фольгированный) шар + лист майлара/фольги для крыльев
+ мелочёвка
Схема
Скетч
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
SoftwareServo myservo2;
int goUp = 0;
int val = 0;
int wait = 0;
int flyFor = 0;
long flapTime = 0;
int angleMin = 0;
int angleMax = 120;
int upSpeed = 20;
int downSpeed = 1;
int buffer = 0;
//Sound variables
int potPin = 1; // select the input pin for sound sensor
int ledPin = 13; // select the pin for the LED
int soundVal = 0;
void setup()
{
pinMode(ledPin, OUTPUT); // declare the ledPin as an OUTPUT
myservo.attach(2); // attaches the servo on pin 2
myservo2.attach(4);
Serial.begin(9600); // open the serial port at 9600 bps:
}
void loop()
{
// Servo
if (flyFor < flapTime){
if (wait == 5){
if (val < angleMin){
goUp = 1;
digitalWrite(ledPin,HIGH);
}
else if (val >angleMax){
goUp = 0;
digitalWrite(ledPin,LOW);
}
if (goUp == 0){
val-=upSpeed;
}else {
val+=downSpeed;
}
}
wait++;
if (wait > 200)
wait = 0;
myservo.write(val);
// sets the servo position according to the scaled value
myservo2.write(120-val);
SoftwareServo::refresh();
flyFor++;
}else{
//Sound
soundVal = analogRead(potPin);
Serial.println("Listening............");
if( soundVal>1020 ){
Serial.println("FREEAK OUT!");
upSpeed = 15;
downSpeed = 15;
angleMax = 45;
angleMin = 10;
flapTime = 6000;
}
else if (soundVal<450 || soundVal >750){
if (buffer == 0){
Serial.println(soundVal);
upSpeed = random (1, 20); //1 to 30
downSpeed = random (1, 30);// 1 to 30
angleMax = random (110, 120);
angleMin = random (30, 45);
flapTime = 10000 + random (5000 , 10000);
flyFor = 0;
buffer = 15;
}else{
buffer--;
}
}
}
}
Ссылки
http://meandollie.com — Ollie is a DIY autonomous robotic blimp
инструкция по сборке
0 комментариев на «“Ollie — рободирижабль под управлением Arduino”»
Мне кажется, было бы интереснее оснастить его УЗ сенсором высоты ;).