

А вот предположим, валяется у вас на антресолях старый ноутбук.
Вроде ещё не самый старый, например — Lenovo B450 с Celeron Dual Core T3000 1.8 ГГц, 2Гб RAM, 300 Гб HDD.
Правда, батарея уже больше 30 минут не держит и радиочасть Wi-Fi умерла, ну да это ничего — можно Wi-Fi «свисток» воткнуть.
Вот что можно сделать с этаким агрегатом?
У меня ответ только один — конечно же, робота!
Приступаем 🙂
Первым делом скачиваем последний дистрибутив Ubuntu — 14.04.1 LTS.
При помощи Universal-USB-Installer записываем на USB-флешку и устанваливаем на ноут, снося весь ненужный хлам.
Итак, установили операционку.
Хорошо.
Настраиваем доступ в сеть.
Например, через тот же Wi-Fi.
Теперь, настала пора установить операционну систему для роботов — ROS.
Недавно, как раз, вышел новый релиз — ROS Indigo Igloo.

Устанавливаем.
http://wiki.ros.org/indigo/Installation/Ubuntu
Замечательно!
Теперь пора и датчик какой-нибудь подключить, правда?
Тот же Microsoft Kinect вполне подойдёт 😉
Тем более, он тоже лежит-дожидается своей участи 🙂
К ROS Electric мы его уже подключали.
В ROS Indigo разница небольшая.
Устанавливаем нужные пакеты:
sudo apt-get install ros-indigo-openni-camera sudo apt-get install ros-indigo-openni-launch
запуск тот же (в отдельных терминалах):
roscore
roslaunch openni_launch openni.launch
Для просмотра появившихся топиков используем:
rostopic list
А вот для преобразования данных от Kinect-а (облака точек) в данные лазерного дальномера, нам теперь поможет другой пакет:
depthimage_to_laserscan
Устанавливаем пакет depthimage_to_laserscan:
sudo apt-get install ros-indigo-depthimage_to_laserscan
Запускаем:
rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/depth/image_raw
Посмотреть, что у нас получилось поможет всё тот же rviz:
rosrun rviz rviz
Видим отображение показаний «лазерного дальномера» (отображение облака точек отключено, так как сильно тормозит):
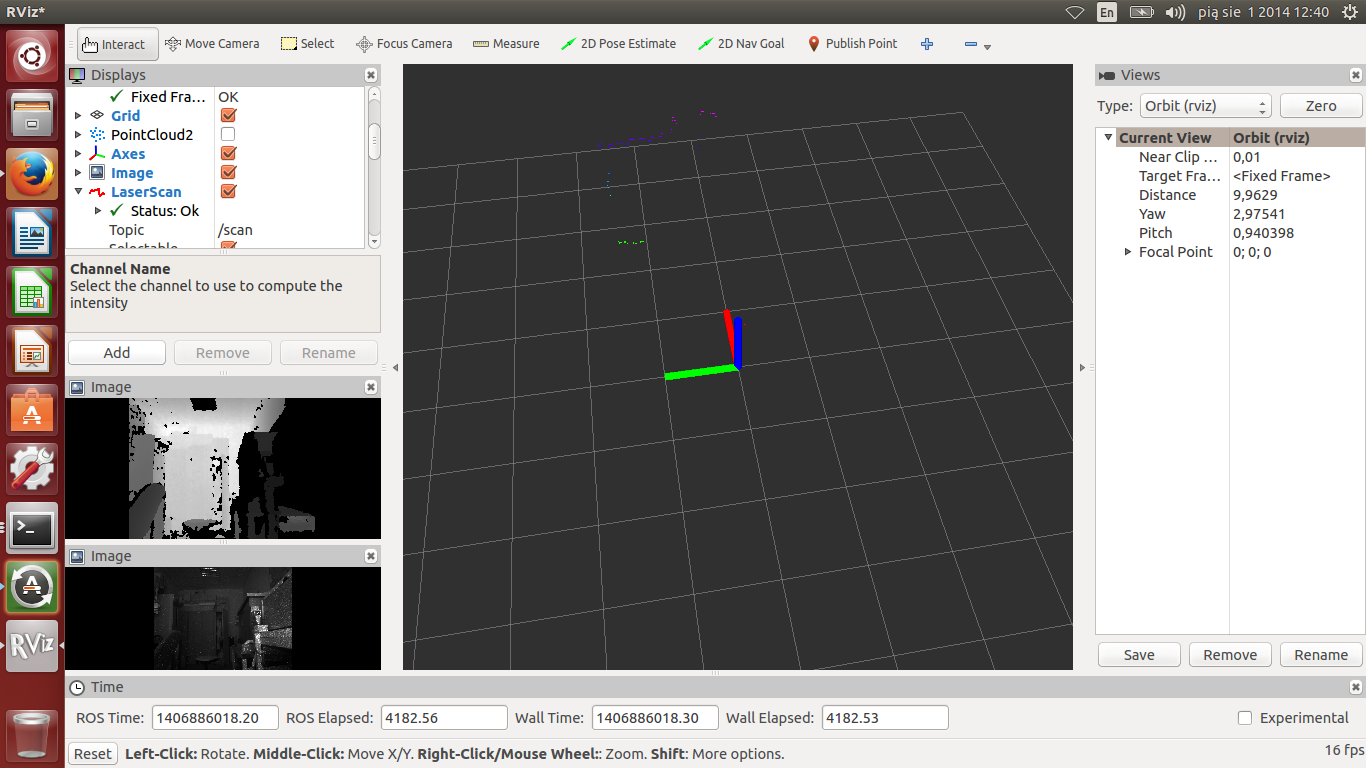
Работает!
продолжение следует…
Ссылки
http://www.ubuntu.com
Universal-USB-Installer
Подключение Raspberry Pi к Wi-Fi
ROS Indigo Igloo
Ubuntu install of ROS Indigo
Работа с Kinect под ROS
depthimage_to_laserscan
По теме
Мозги для робота
Робософт — обзор существующих решений
ROS — Robot Operating System
Что же такое ROS?
Работа с Kinect под ROS — часть 2 — преобразование облака точек в данные лазерного дальномера
0 комментариев на «“История про превращение старого ноутбука в робота. Начало”»
Супер, продолжайте писать!
не получается установить пакет depthimage_to_laserscan!
С нетерпением жду продолжения 🙂
Кстати, важный момент по поводу Kinect, взятый отсюда: forumdvrobot.ru/forum/3-64-1:
«сенсор от игровой приставки XBOX 360, он идет в комплекте с приставкой, но сам сенсор можно купить и отдельно, главное чтобы это был сенсор под WINDOWS, это важно! т.к. такой сенсор оборудован USB переходником. Я натыкался на кинект для приставки XBOX, такой подключить к компьютеру не получится. А главное, что менеджеры в компьютерных магазинах тоже не разбираются в них. В общем так, если будете брать, просите чтобы открыли коробку, и смотрите на провода в комплекте — во первых должен быть блок питания, а во вторых на шнуре должен быть разъем USB для подключения к ПК.»