

Loki — самодельный робот от Dave Shinsel (руководитель группы программистов в Intel), сделанный в качестве хобби.
Механика
Робот уже претерпел несколько трансформаций и на данный момент выглядит так:



Бортовой вычислитель Loki — это обычный ноубук:

— доступ к клавиатуре ноутбука
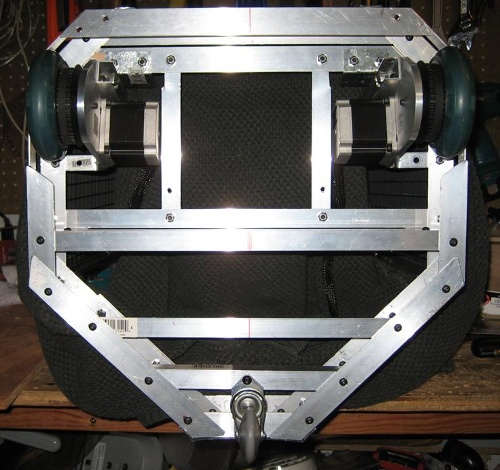
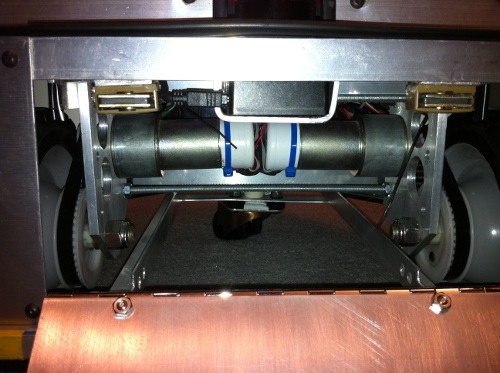
Доступ к моторному отделению:

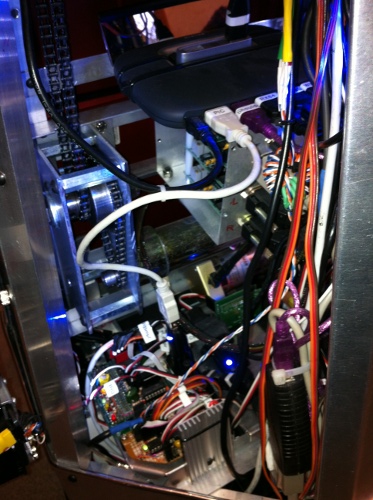
Внутренности:

«а внутре у него неонка»

Голова робота

— сервомашинка, две камеры и два Sharp-овских ИК-дальномера.
Колёсный узел
Как я понял, в первой версии, робот катался на двух шаговых двигателях:
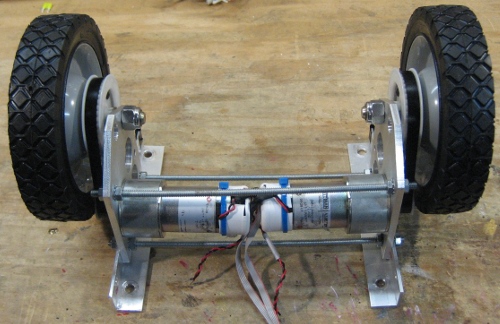
в последней версии, так же используется стандартная трёх-колёсная схема
дифференциальный привод (differential drive robot) — два ведущих колеса и одно — подруливающее, каждое ведущее колесо приводится в движение отдельным двигателем.
Пример: робот-пылесос iRobot Roomba.
, но теперь в роли ведущих выступают два мотор-редуктора с энкодерами:
Электроника
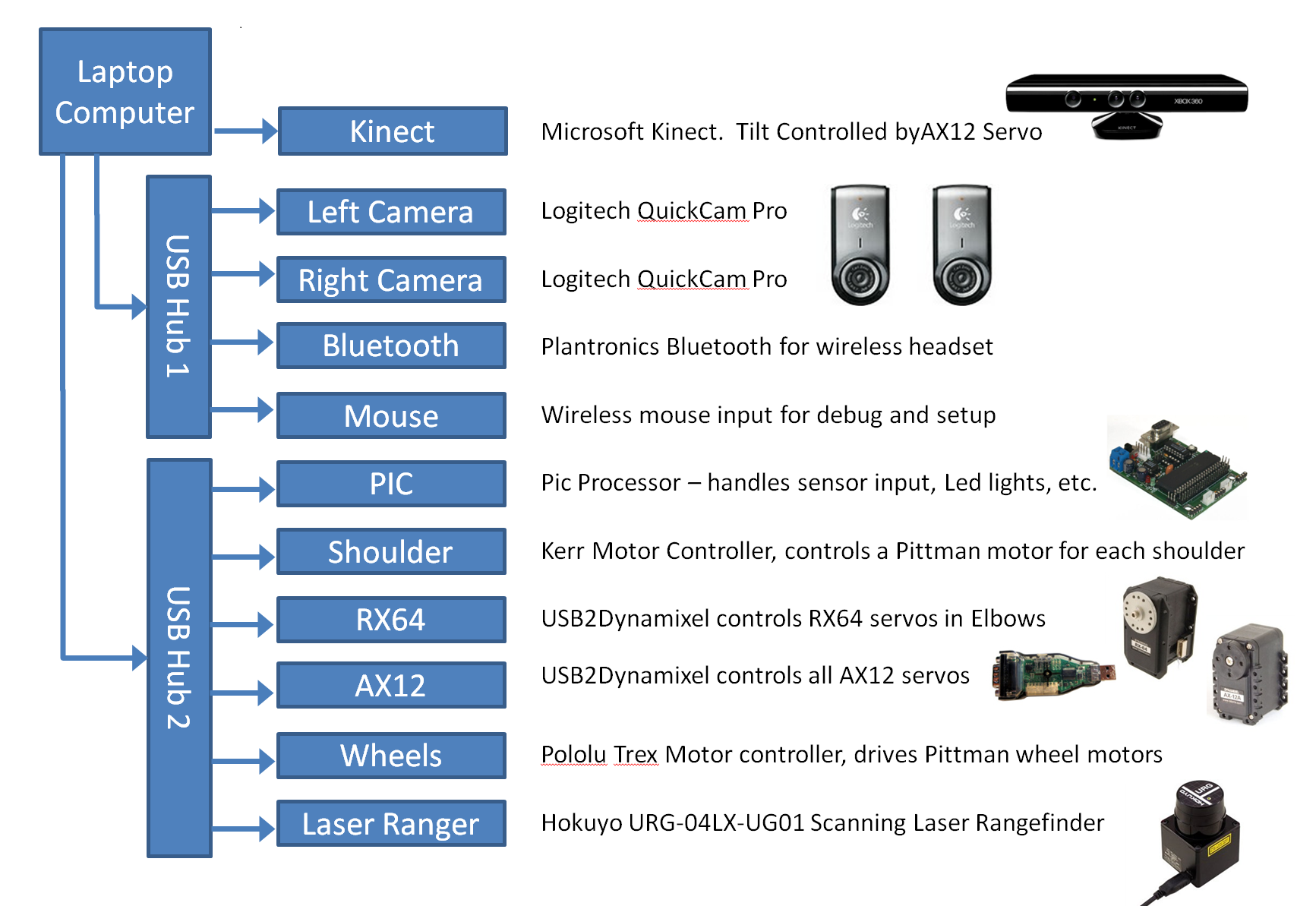
В основе робота Loki лежит ноутбук (под операционной системой Windows XP), к которому через два USB-хаба подключены:
* сенсор Microsoft Kinect
* две web-камеры (Loitech QuickCam Pro)
* Bluetooth
* контроллер на базе PIC
* контроллер двигателей
* USB2Dynamixel — контроллер для управления сервомашинками Dynamixel
* лазерный дальномер (Hokuyo URG-04LX-UG01)
блок-схемы

на сайте автора так же доступны принципиальные схемы робота.
Софт
Управляющий софт открыт и выложен одним архивом
LokiSource.zip (38MB)
— солюшн Visual Studio на C++
блок-схема:
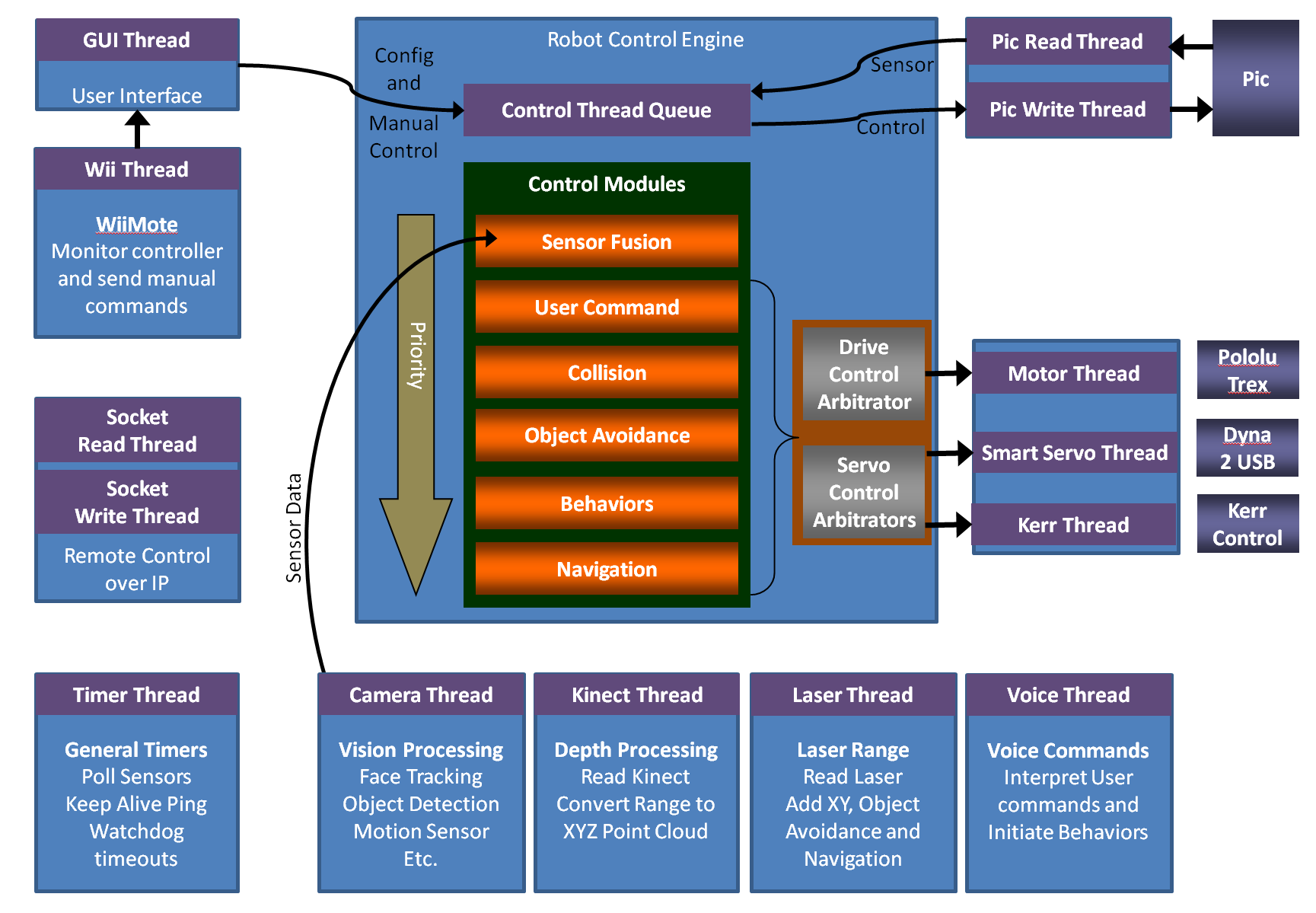
Обработка видео, разумеется, осуществляется при помощи OpenCV
Видео
Loki Robot — video 2 (Exploring the house)
Ссылки
Loki
Loki Electronics
Loki Software
Loki Mechanical
Components and Sensors
0 комментариев на «“Loki — самодельный робот”»
Qbo очень милый, и хотел бы десяток таких ребят к себе домой, но этот меня пугает. Он выглядит злым, стоит уснуть- и он уже душит тебя