
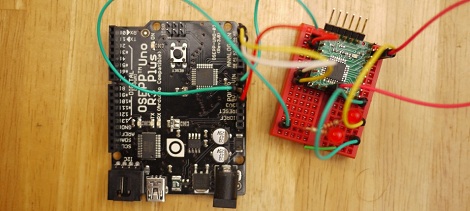
Multiplo — Open-Source Robot Kit на базе Arduino

Multiplo — система, разработанная специально для прототипирования роботов.
Проект был профинансирован на кикстартере.
В качестве вычислителя используется контроллер DuinoBot — 100%-совместимый с Arduino
Подробности: http://multiplo.org
Автоматическая газель на Arduino
Использование связки из ноутбука, контроллера Arduino, телефона, камеры, лазерного дальномера SICK LMS 511, энкодера на руле фирмы Autronics, стеклоподъемников от автомобилей ВАЗ и драйверов двигателей MoviServo для автоматизации автомобиля, участвующего в 3-их Всероссийских соревнованиях автомобилей роботов РОБОКРОСС-2012.
Подробности: Автоматическая газель на Arduino (часть 1)
Библиотека ExtraCore для связки двух контроллеров Arduino
Используя библиотеку ExtraCore (код библиотеки на гитхабе), любой пользователь сможет управлять входными и выходными пинами двух контроллеров Arduino так же легко, как и одной Arduino.
Подробности: Easily manage I/O on a remote Arduino using two wires and the ExtraCore library
Двуногий робот из бумаги
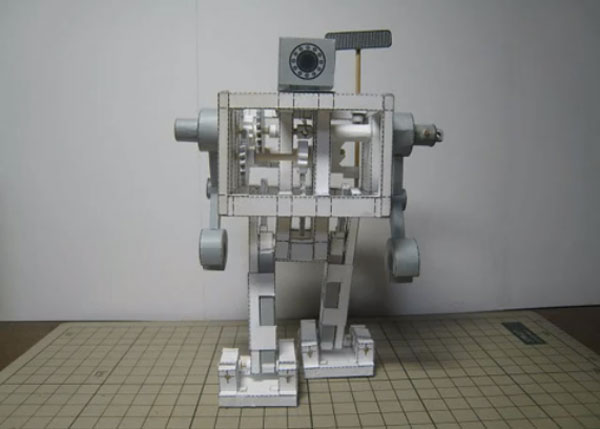
Завораживающее видео сборки ходящего двуногого робота:
Подробности: Paper Robot
Mjolnir — телеуправляемый робот на базе Arduino
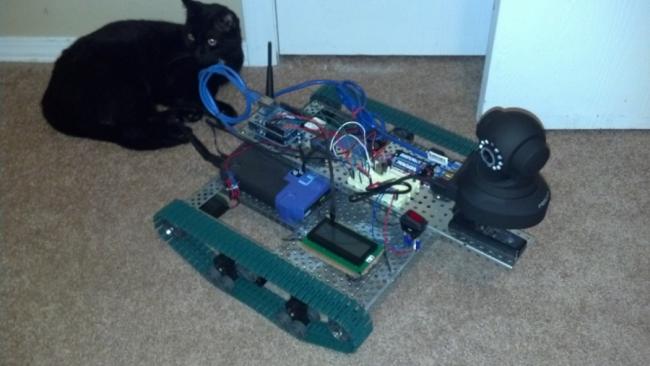
Arduino, Ethernet-шилд, Wi-Fi роутер и поворотная IP-камера позволили собрать робота, управляемого удалённо с планшета под ОС Андроид.
Подробности: Mjolnir robot
iRobot представили надувную руку-манипулятор
Подробности: iRobot Developing Inflatable Robot Arms, Inflatable Robots
iRobot Advanced Platforms
Ближайшее будущее робототехники
Робототехника всерьёз проникает в нашу жизнь: исследования океанов и космоса, переработка отходов, использование военным и полицией, помощь пожилым людям и инвалидам, медицинские операции, которые человек не может сделать, очистка наших квартир, умный дом, автоматизация автомобилей и городов.
Подробности: The Future of Robotics, The Next 20 Years
Книга про ROS: ROS by Example (ROS на примерах)
Patrick Goebel, известный своим проектом http://www.pirobot.org представил свою книгу — ROS by Example (ROS на примерах).
По словам автора, книга предназначена для новых пользователей ROS, которые хотят выйти за рамки начальных уроков ROS и создать какое-нибудь рабочее приложений для ROS (либо в симуляторе, либо для реального робота, типа TurtleBot). В книге, шаг за шагом объясняются примеры кода для ROS, который можно загрузить из репозитория.
Книга: ROS By Example
ROS: новый стек Robotiq

В ROS добавлен новый стек — Robotiq, для управления одноимёнными адаптивными захватами.
В настоящее время, реализовано управление по протоколу TCP/IP, но сами захваты позволяют управлять ими через Ethernet/IP, TCP/IP, DeviceNet, CANopen, EtherCAT, Modbus RT.
Подробности: http://robotiq.com
New Stack: Robotiq
Liquid Robotics — роботы для исследования океана
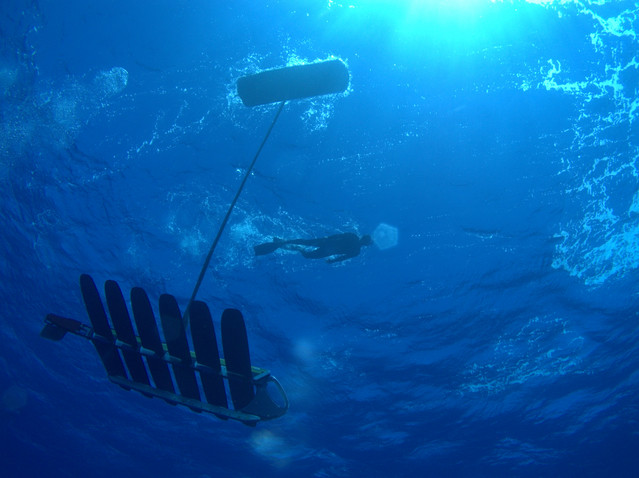
Компания Liquid Robotics выпускает оригинальных роботов — Wave Gliders, которые представляют из себя морское автономное транспортное средство, размером с доску для серфинга (вес робота — около 90 кг).
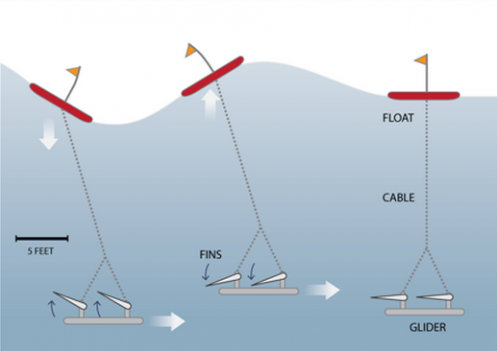
Сам робот состоит из надводной и подводных частей, которые связаны между собой кабелем.
Важным моментом является возможность этих роботов работать не только на солнечных батареях, но и способность использовать для передвижения энергию волн(используется различие между движением волн под водой и на поверхности).
Подробности: Liquid Robotics
Самодельный торс гуманоидного робот с Kinect-ом на борту

Malte Ahlers из Германии представил свою последний робототехнический проект — торс гуманоидного робота.
Подробности: Humanoider Roboter-Torso A1
Nokken-3 — подводный исследовательский робот

видео работы:
Подробности: Nøkken 3 — ROV (Underwater Exploration Vehicle)
Электроника
видео самостоятельного изготовления двусторонней платы: