
RGB-лампа под управлением Arduino

Этот проект демонстрирует работу RGB-лампы на цифровой светодиодной ленте.
После активации Bluetooth-соединения, пользователь может запустить на ПК программу с графическим интерфейсом, для управления лампой.
Программа показывает палитру оттенков, разделённую на 30 полос (по одной для каждой светодиодный ленты).
Подробности: An Arduino-controlled RGB lamp
Управление Arduino c часов TI eZ430 Chronos

Связь с часами возможна благодаря ключу USB, идущему в комплекте с часами, который подключается к USB-хосту платы Arduino.
Подробности: Control an Arduino With a Wristwatch (TI eZ430 Chronos)
Инфографика по RS-232 и RS-485
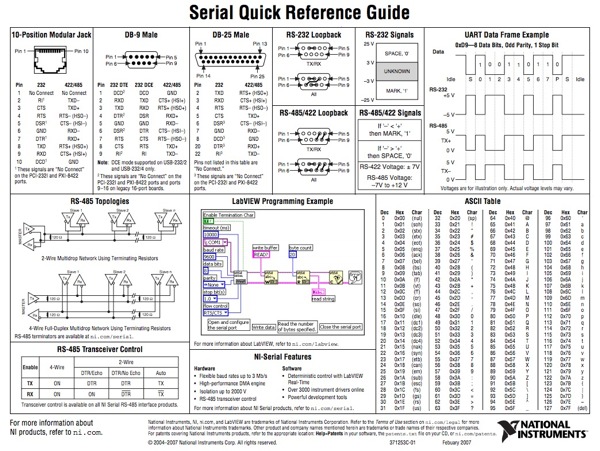
Удобная инфографика по стандартам RS-232 и RS-485 от National Instruments.
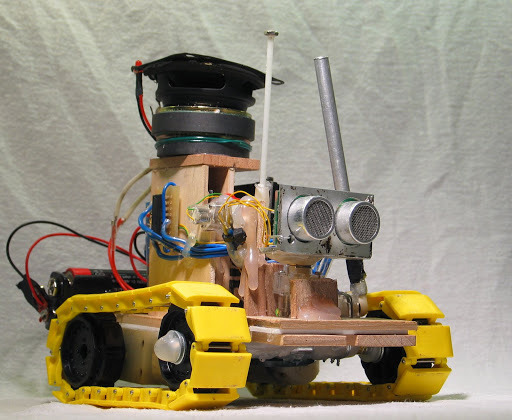
Хакинг Hexbug™ Spider XL и добавление ему OpenCV-го зрения на смартфоне под Andorid

Подробности: Hacking the Hexbug™ Spider XL to Add Computer Vision Using a Smartphone
Рободворник

видео:
Робот-дворник ROBOPLOW — замечательный пример лени, как двигателя прогресса.
Робот-барабанщик
видео работы:
Замечательный робот — барабанит по всему, что найдёт 🙂
Подробности: Yellow Drum Machine
Yellow Drum Machine — build tutorial

Raspberry Pi и поворотный энкодер
для контроля энкодера используется библиотека py-gaugette
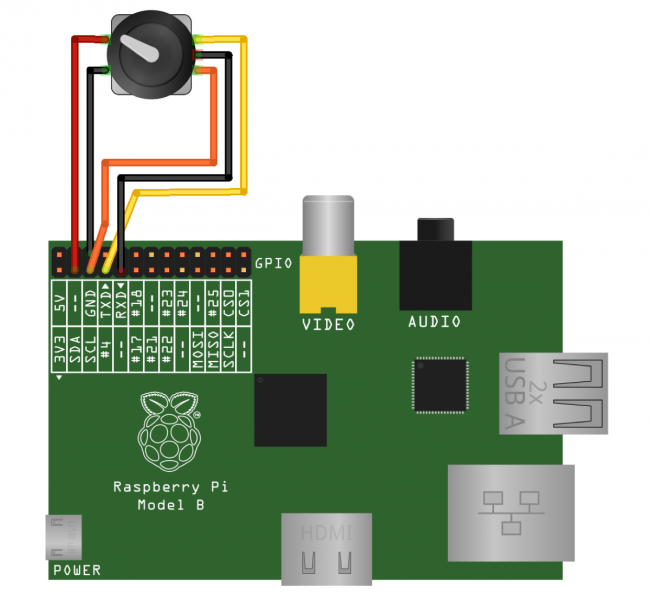
Подробности: Rotary Encoder Library for the Raspberry Pi
Управление Raspberry Pi через Google Talk
Подробности: Raspberry Pi Google Talk Robot
Raspberry Pi и управление светодиодной RGB-полосой
Подробности: Raspberry Pi + PWM RGB LED Strip
Raspberry Pi и управление моторчиком
Для управления моторчиком используется скрипт на питоне и популярный драйвер двигателей — L293D
Подробности: Adafruit’s Raspberry Pi Lesson 9. Controlling a DC Motor
Улучшение восприятия в PCL
Stefan Holzer из TU Munich продемонстрировал новые алгоритмы в библиотеке для работы с облаком точек — Point Cloud Library (PCL). Основной упор был сделан на алгоритм распознавания объектов и машинном обучении в PCL.
Для обнаружения объектов, по данным от 3D-сенсора Microsoft Kinect, используются цветовые градиенты, которые вычисляются из изображения, а также нормали к поверхности, вычисленные из данных глубины.
Подробности: Improving Perception in PCL
Unsupervised Object Discovery With Megaworldmodel
ACTUV — новый робот от DARPA — морской робот-катамаран для обнаружения и слежения за подводными лодками

ACTUV — Anti-Submarine Warfare Continuous Trail Unmanned Vessel, задачей которого является поиск и слежение за подводными лодками противника (при помощи гидролокатора).
Разработкой этого морского робота занимается компания Science Applications International Corporation (SAIC). Начало испытаний ВМС США планируют на середину 2015 года.
Подробности: Anti-Submarine Warfare (ASW) Continuous Trail Unmanned Vessel (ACTUV)
А ещё:
MakerBot Changes the Name of Thingiverse to MakerBot Thingiverse
Ford выпустил SDK для своих автомобилей
USING CRYSTAL PINS AS I/O ON MSP430
LogicDiscovery — простой логический анализатор
Videos of the Embedded Linux Conference Europe 2012
Обработка изображений при помощи OpenGL и шейдеров