
Language Model Predictive Control (LMPC) — Прогнозное управление языковой моделью — это метод от Google DeepMind, позволяющий ускорить обучаемость (быструю адаптацию к обратной связи) большой языковой модели (БЯМ, LLM), пишущей код для управления действиями робота.
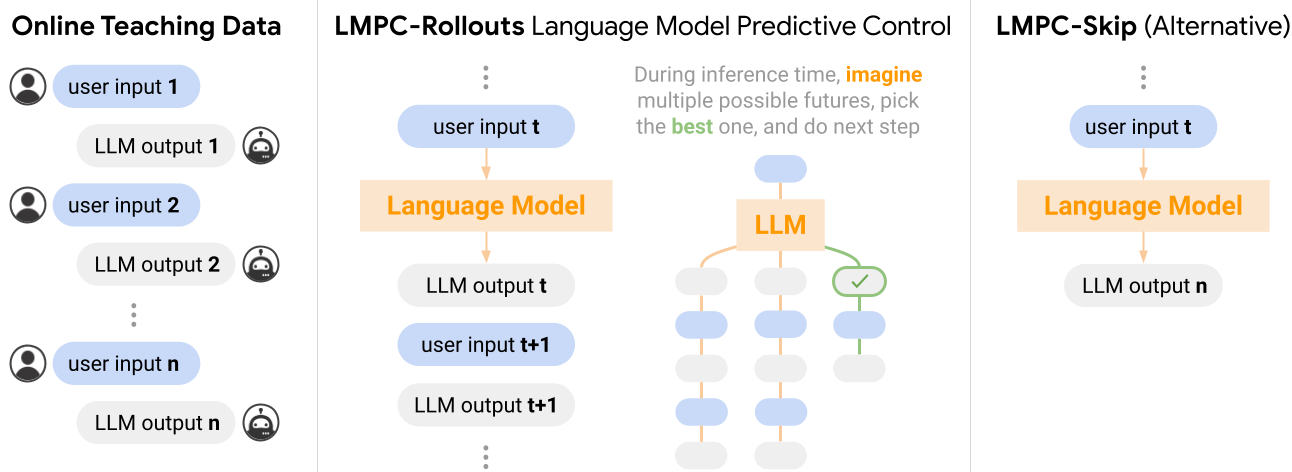
Используя собранный набор данных пользователей, обучающих роботов новым задачам с помощью языковых инструкций (в виде текстового ввода пользовательских команд и получаемого кода (на рисунке — слева)), можно обучить БЯМ прогнозировать последующие команды и код с учетом текущей истории чата (на рисунке — в центре (LMPC-Rollouts)), либо обучить БЯМ предсказывать сразу последнее правильно действие (на рисенке — справа (LMPC-Skip)). Оба варианта LMPC ускоряют адаптацию робота посредством контекстного обучения.
Статьи
Ссылки
По теме
- Dobb·E — открытый проект по обучению робота выполнять домашние дела
- TidyBot — персонализированный робот-помощник на основе больших языковых моделей
- Awesome-LLM-Robotics — список статей про использование больших языковых моделей в робототехнике
- Microsoft предложила использовать ChatGPT для управления роботами
- Роботы Everyday Robots от Alphabet начали выполнять уборку в офисе Google