
Что-то все молчат об OpenSource-симуляторе роботов Gazebo. Народ, да ведь это же шанс заниматься робототехникой для всех, у кого нет робота! А также для всех, кто хочет попробовать и отладить некоторые задумки, алгоритмы.
Я знакомилась с Gazebo 2 года назад, даже делала там модель стола для соревнования Eurobot. Тогда мне всё понравилось (симуляция физики, совместимость с ROS, обучающие примеры, лицензия GNU/GPL), кроме одного момента: установка и настройка симулятора превращалась в настоящий ад.
Ребята сделали выводы и всё полностью переработали. Сделали новый красивый сайт http://gazebosim.org и выпускают версии симулятора одна за другой. Такой рывок произошел с финансовой помощью от Open Source Robotics Foundation, куда входят DARPA, NASA, Willow Garage и другие гранды.
Самое главное: установка теперь стала очень простой! Доступен пакет для Debian.
Другие приятные мелочи: всё работает ощутимо быстрее, интерфейс чуть улучшился и стал выглядеть посовременнее.
Отлично, что сразу доступна большая библиотека моделей. Это и роботы, такие как PR2, робот-пылесос, Pioneer. Это и предметы — например, бутылка пива, дрель, молоток, стол, дверь и другие полезные объекты. Это и помещения — огромное здание с кучей комнат. Каталог моделей лежит на сайте, их можно подгружать себе на диск прямо из интерфейса симулятора и дальше уже использовать в своих проектах.
Ещё поменялся язык описания моделей. Это, как и раньше, XML-разметка. Если для прошлой версии приходилось изучать URDF, то теперь — SDF (Simulation Description Format). Впрочем, различия невелики, ядро то же самое — главное в том, что SDF позволяет описывать положение робота и его частей с привязкой к окружающей среде, а не изолированно.
Я сейчас делаю эксперимент по обучению робота методом Энглуин (синтез конечного автомата). Вместо того, чтобы мучить железного робота, я взяла модель в симуляторе и программирую его на С++. Если не получится на симуляторе — то на настоящем роботе даже и пробовать не буду.
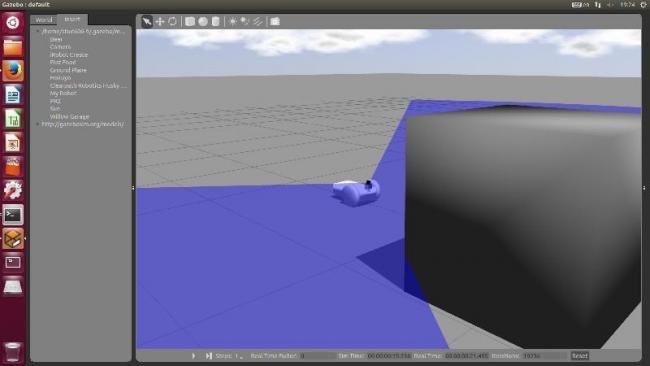
Чтобы разобраться и сделать по руководству модель простого робота с дальномером, у меня ушло часа 2. В итоге получилась картинка, которую Вы можете видеть в заголовке этого поста.
Я просто шла по пунктам руководства: вначале сделала простейшую модель робота (корпус, 2 ведущих колеса и одно вспомогательное), потом добавила к нему дальномер, потом запрограммировала поведение робота на C++. Всё прошло гладко за исключением того, что в какой-то момент для компиляции потребовалась библиотека TinyXML, пришлось её тоже ставить (странно, что разработчики не включили её в установочный пакет).
Если кратко, то это 100% гиковский симулятор, лучше всего он годится для исследований и экспериментов. Работает под POSIX-системы, под Windows даже и не думайте его установить. Дружественность к пользователю отсутствует, если вы не знаете C++ и плохо ориентируетесь в UNIX-системах — забудьте о Gazebo и поставьте Webots (только учтите, что он коммерческий).
0 комментариев на «“Большое обновление симулятора Gazebo: удобнее, красивее, проще”»
Спасибо за отличную новость!
Всё собирался написать про этот симулятор — даже наброски заметки где-то сохранились, но всё руки никак не доходили 🙂
Про python тоже чуток написано в вики.
Atlas control over ROS topics with python —
Предоставляется контроль над моделями роботов в среде Gazebo с использованием ROS и дополнения к Gazebo — DRC Simulator.
Тоже надо будет попробовать.
Таня, ты как всегда молодец! Я тут очередной курс по мобильным роботам буду вести в ноябре
Приходи, пообщаемся, а то давно уже не виделись.