Уже настал понедельник, а я как и обещал выкладываю статью — продолжение:
Итак, продолжим создание нашей машины. Напомню, что у нас уже создано управление и сейчас дело за корпусом. По причине нехватки денег у студентов, было решено выбрать самый бюджетный вариант: «handwork» или сделай все руками сам. Но начинать все нужно с идеи которая зародилась у меня в голове, вернее не в голове, а «честно» национализирована у гугла. Я давно приметил себе Pirate-4WD Mobile Platform

Многофункциональная металлическая платформа от DFROBOT.
Но заказывать я побоялся, а покупать на Ампреке, например, дорого. Особенно для студента. На ROBOCRAFTe к сожалению такой нет, поэтому решил сделать такую же, только уменьшенную. Спасибо SolidWorks Corporation за прекрасную программу, а если быть точным, то
» программный комплекс САПР для автоматизации работ промышленного предприятия на этапах конструкторской и технологической подготовки производства «
. именно в этой программе и стала зарождаться моя платформа. были сделаны все аналоги платформы, только в уменьшенных размерах.
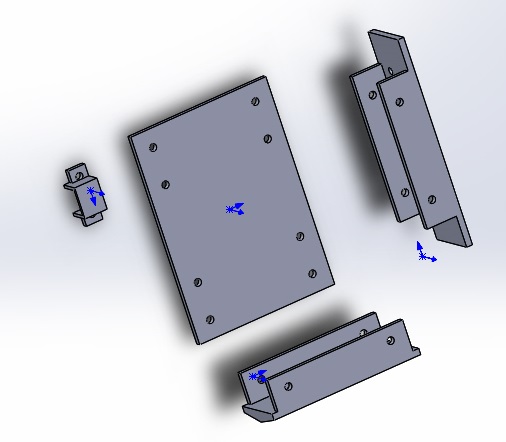
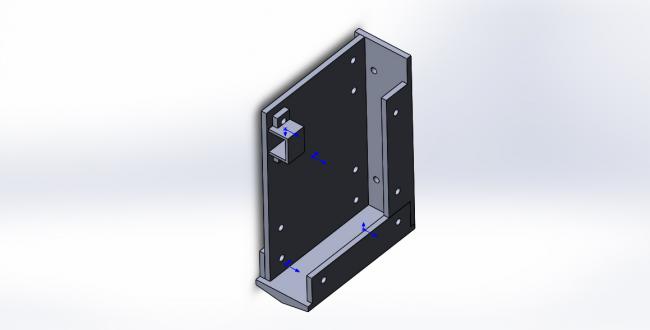
собранное все это выглядит вот так:
ну и несколько слов хочется сказать о размерах всей этой конструкции :
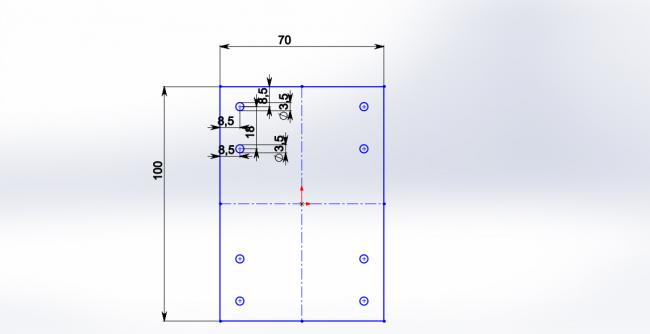
70 мм * 100 мм , правда не плохо получилось?!) Расчет отверстий был взят для Микро мотор-редукторов думаю многие в своих проектах выбирают именно их, ведь они маленькие и удобные. Я не стал исключением.
Когда оставалось только продумать крепление для Arduin’ы на меня опять напала » инженерная лень » и я стал опять гуглить. В этот раз я нагуглил интересный сайт : thingiverse По сути этот сайт своего рода » склад » STL моделей для 3D печати. На этом сайте можно найти все что хочешь : от болтов и гаек до планетарной модели, которую я и забрал себе ) так же на этом сайте я нашел много интересных и уже готовых робо платформ. например MiniSkybot Robot V1.0 , Traxbot — an EZ-robot build ( для передачи вращения используется планетарная модель, интересный ход), TOM Tri-Track dual servo robot tank chassis , EZ Robot Wall E ish wanabe ( робот по мотивам мультика студии PIXAR » WALLI » ), ну и то что выбрал я : BoboBOT ( совместимый с popolu деталями робо платформа, а если быть точнее то ее » копия » )
Выбрана была именно эта модель из-за ее размеров, хотелось что то маленькое и аккуратное. Выбрав модель и найдя на сайте Popolu эту самую робо-платформу мне перехотелось ее покупать из-за сроков доставки, идет кибервесна и хочется участвовать, а не сидеть и ждать свою посылку. И тогда, я решил воспользоваться помощью друзей LAB_409. У них как раз в наличии есть 3D принтер, которым я и воспользовался. в перерыве , пока ждал готовность печати, нашел еще колеса для этого маленького чуда. в итоге я получил готовую робо платформу и колеса для нее. Остались только траки, но думаю здесь можно что то придумать )))
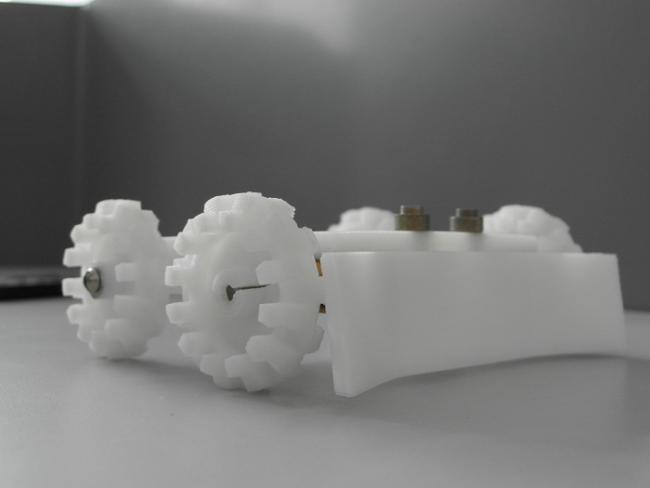
В итоге мы имееем вот такое чудо :
— почти разобрана, просто колеса уже прикрепил, а сфотографировать забыл.
— вид снизу, крепление для микро-моторов
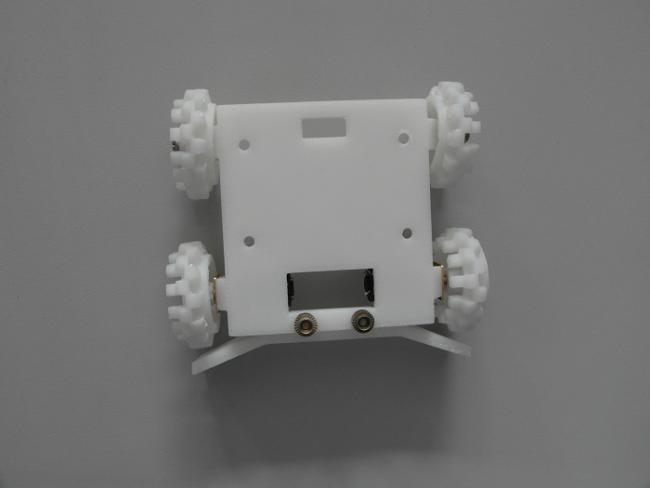
— вид сверху
В итоге мы уже имеем платформу , пульт управления и программу управления. осталось дело собрать это все вместе ( в следующей статье ) и пугать своих домашних животных. Как по мне , так не плохо получается.
p.s. тот самый пульт: