
Начну с небольшой предыстории:
Работа у меня связана с частыми командировками по России матушке и чтобы, постоянно не просить родственников посмотреть за квартирой, был сконструирован данный робот.
На данный момент реализовано управление и просмотр видео через браузер с любого устройства по средствам Internet.
Что планируется доделать в ближайшем будущем:
— получать данные с гироскопа MPU-6050 о положение робота в пространстве;
— записывать на внешний накопитель фото и видео ;
— подключить 3G модем, чтоб была постоянная связь с Internetом;
— настроить библиотека компьютерного зрения OpenCV для распознавания лиц и предмеров;
— сам перемещаться по площади (квартире и тд) используя датчик Ultrasonic HC-SR04 для обьезда препядствий;
— снимать через определенное время фото (видео кадр) снимок и отправлять его на яндекс или гугл диск;
— сам подьезжать на базу для подзарядки используя ИК-локатор.
Итак, что нужно нам для сборки ?
-шасси. Тут выбор падает на наши возможности. Сделать самому или купить готовое, переделать имеющееся;
— миникомпьютер Raspberry PI с картой памяти на 8 Гигабайт и установленной на нее операционной системой Raspbian;
— Wi-Fi адаптер, подойдет TP-LINK TL-WN725N;
-камера USB или оригинальная для raspberry;
— винтики, болтики и самое главное аккумуляторы !!!
Так же еще необходимое количество датчиков, от которых зависит функционал
работы нашего с Вами робота.
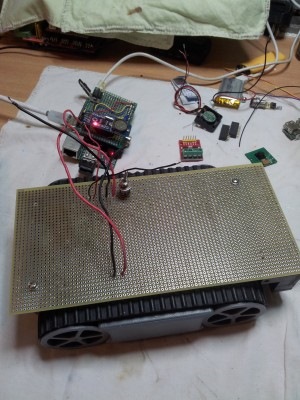
В шасси робота устанавливаем аккумуляторы. Мне попался живой аккумулятор от ноутбука или нетбука, который был немедленно разобран на составляющие.

Состояние внутренних батарей показало, что из 8 батарей живые только 4. Вот их и будем использовать. Все ставим в корпус нашего шасси, так же ставим небольшой преобразователь для питания Raspberry, так как она питается от 5В, а аккумуляторы рассчитаны на 3.7В. Два аккумулятора питают двигатели через L293D, а другие два как раз миникомпьютер. Роль крышки и основы для крепления камеры миникомпьютера и другого оборудования используется обыкновенная макетная плата.

Выбор обусловлен дешевизной, а так же способностью что то спаять прямо на месте не прибегая к полной-частичной разборки робота.
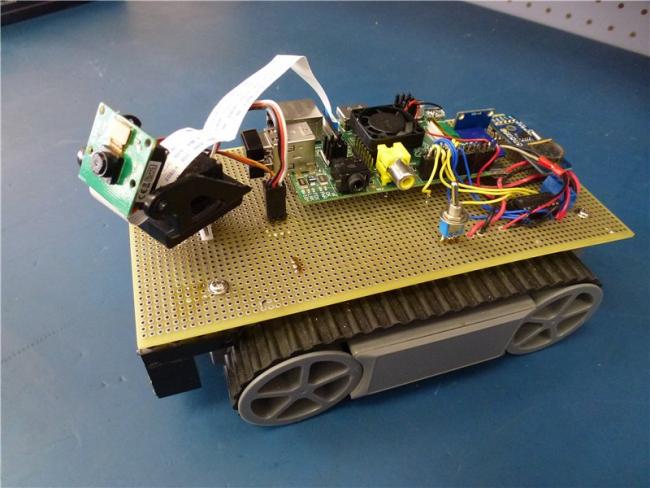
В общем крепим, проделов несколько тех отверстий под провода питания и провода моторов. В итоге получается что-то такое
Смонтировал сразу же тумблер включения питания. Просто припаяв его к макетке с подводом соответствующих проводов с обратной стороны.
Raspberry PI не имеет крепежных отверстий потому пришлось решать вопрос крепления платы к макетке. Для крепления использовал контакты от вилки PLS-40 прямые. Предварительно припаяв их к свободным выводам Raspberry,

а после припаял к самой макетке.
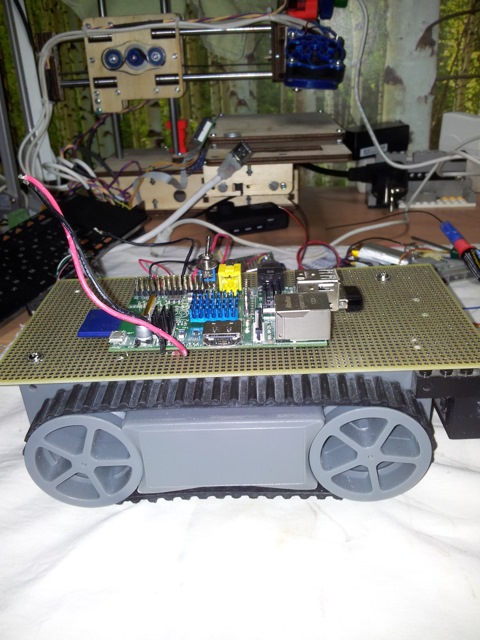
Рядом с компьютером разместил часы реального времени, для понимая когда фото или видео было сделано. Так же размещен гироскоп и драйвер L293.
Выбор на данный драйвер был обусловлен дешевизной и простотой сборки. Пока что работает без сбоев. Драйвером моторов будем управлять прямо с портом с портов GPIO Raspberry.
Зарядка робота будет осуществляться с док станции к которой надо будет подъехать. Для этого на передней части шасси установлены контакты для подзарядки.
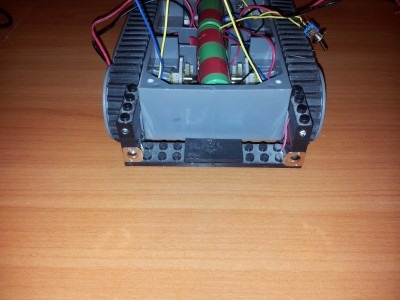
Тут честно сказать пригодился старый конструктор Lego, из которого были изьяты необходимые детали.
На данном этапе закончили механическую сборку и надо уже приступать к программированию, так сказать и установке программ. Но это в следующий раз…
P.S. Всем Спасибо !!!