
Продолжение…… (Начало 1 )
Гусеницы,платформа,двигатели Tamiya
Автономное питание 4х1,5В батарейки в держателе батареи 4-AA
+ куча деталей из китайского конструктора
Для подключения двигателей микросхема L293N
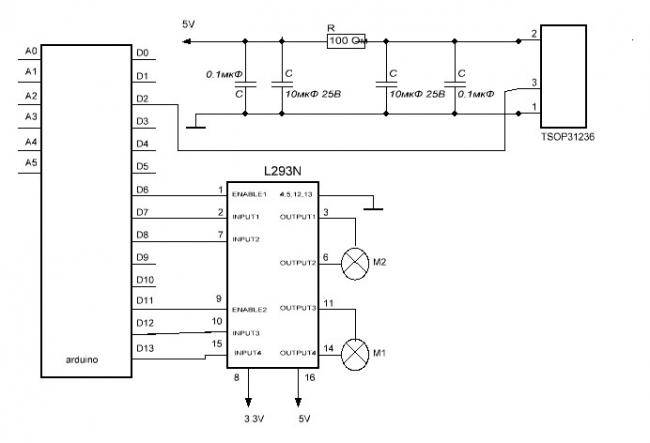
Управление скоростью движения — подачей ШИМ на входы ENABLE1, ENABLE2 микросхемы L293N
мин. скорость подбирается (при подаче питания на моторы +5В — это 130 — при меньших не двигается)
плавность поворота регулируется разностью скоростей моторов
поворот на месте — моторы крутятся в разные стороны (здесь тоже регулируем скорость вращения)
Для хранения текущего состояния моторов
struct POZ // структура для хранения статусов моторов
{
int poz1; // позиция для 1 мотора
int poz2; // позиция для 2 мотора
int direction12; // направление до поворота
};
Все данные о скоростях, направлениях движения,
хранятся в массиве arrpoz[9][17]
// массив возможных состояний моторов
// max down -> min down -> stop -> min up -> max up
int arrpoz[9][17]={
// in1 первого мотора
{0,0,0,0,0,0,0,0,1,1,1,1,1,1,1},
// in2 первого мотора
{1,1,1,1,1,1,1,0,0,0,0,0,0,0,0},
// скорости (enable1) первого мотора
{250,230,210,190,170,150,130,0,130,150,170,190,210,230,250},
// in3 второго мотора
{0,0,0,0,0,0,0,0,1,1,1,1,1,1,1},
// in4 второго мотора
{1,1,1,1,1,1,1,0,0,0,0,0,0,0,0},
// скорости (enable2) второго мотора
{250,230,210,190,170,150,130,0,130,150,170,190,210,230,250},
// скорость++
{0,-1,-1,-1,-1,-1,-1,0,1,1,1,1,1,1,0},
// скорость--
{-1,-1,-1,-1,-1,-1,-1,0,1,1,1,1,1,1,1},
// кружение влево-вправо
{14,12,10,8,6,4,2,0,-2,-4,-6,-8,-10,-12,-14}
};
Начальная инициализация
POZ POZ12={7,7,7};
— in1=0
— in2=0
— enable1=0;
— in3=0;
— in4=0;
— enable2=0;
При получении кодов от пульта происходит преобразование позиции
в процедуре go12();
Вот весь код
//
#include <IRremote.h>
//вход ИК приемника
int RECV_PIN = 2;
IRrecv irrecv(RECV_PIN);
decode_results results;
unsigned long ir_dt, old_ir;
long ir_kod;
unsigned long ir_time1, ir_time2;
// коды клавиш ИК пульта (marmitek)
#define FORWARD 1936
#define BACK 3984
#define SPEED_UP 144 //ch+
#define SPEED_DOWN 2192 //ch-
#define LEFT 3472
#define RIGHT 1424
#define CIRCLE_LEFT 3216 //vol+
#define CIRCLE_RIGHT 1168 //vol-
#define STOP 2320 //0
// состояние моторов робота
struct POZ // структура для хранения статусов моторов
{
int poz1; // позиция для 1 мотора
int poz2; // позиция для 2 мотора
int direction12; // направление до поворота
};
// моторы
struct MOTOR // структура для хранения номеров pin-ов, к которым подключены моторчики
{
int in1; // INPUT1
int in2; // INPUT2
int enable; // ENABLE1
};
// определяем порты, к которым подключены моторчики
MOTOR MOTOR1 = { 13, 12, 5 };
MOTOR MOTOR2 = { 7, 8, 6 };
// начальная позиция робота
// 1,2 мотор - выключены
POZ POZ12={7,7,7};
// массив возможных состояний моторов
// max down -> min down -> stop -> min up -> max up
int arrpoz[9][17]={
// in1 первого мотора
{0,0,0,0,0,0,0,0,1,1,1,1,1,1,1},
// in2 первого мотора
{1,1,1,1,1,1,1,0,0,0,0,0,0,0,0},
// скорости (enable1) первого мотора
{250,230,210,190,170,150,130,0,130,150,170,190,210,230,250},
// in3 второго мотора
{0,0,0,0,0,0,0,0,1,1,1,1,1,1,1},
// in4 второго мотора
{1,1,1,1,1,1,1,0,0,0,0,0,0,0,0},
// скорости (enable2) второго мотора
{250,230,210,190,170,150,130,0,130,150,170,190,210,230,250},
// скорость++
{0,-1,-1,-1,-1,-1,-1,0,1,1,1,1,1,1,0},
// скорость--
{-1,-1,-1,-1,-1,-1,-1,0,1,1,1,1,1,1,1},
// кружение влево-вправо
{14,12,10,8,6,4,2,0,-2,-4,-6,-8,-10,-12,-14}
};
void setup()
{
// последовательный порт
Serial.begin(9600);
// включить приемник
irrecv.enableIRIn();
// прерывания для ИК
ir_time1=0;ir_time2=0;
attachInterrupt(0, get_ir_kod, FALLING);
// настраиваем выводы для моторов
pinMode(MOTOR1.in1, OUTPUT);
pinMode(MOTOR1.in2, OUTPUT);
pinMode(MOTOR2.in1, OUTPUT);
pinMode(MOTOR2.in2, OUTPUT);
// начальная позиция - робот стоит
go12(POZ12.poz1,POZ12.poz2);
}
void loop()
{
// обработка кода нажатия
if(ir_kod>0)
{
ir_go(ir_kod);
ir_kod=0;
}
}
// получить код переданный с ИК пульта
void get_ir_kod()
{
detachInterrupt(0); // отключить прерывание 0
if (irrecv.decode(&results))
{
if (results.value > 0 && results.value < 0xFFFFFFFF)
{
ir_dt = results.value;
ir_time2=millis();
if (ir_time2-ir_time1>1000)
{ir_kod = ir_dt;ir_time1=ir_time2;}
else
ir_kod = 0;
}
irrecv.resume();
}
attachInterrupt(0, get_ir_kod, CHANGE);
}
// переустановка моторов
void go12(int poz1,int poz2)
{
digitalWrite(MOTOR1.in1, arrpoz[0][poz1]);
digitalWrite(MOTOR1.in2, arrpoz[1][poz1]);
analogWrite(MOTOR1.enable, arrpoz[2][poz1]);
digitalWrite(MOTOR2.in1, arrpoz[3][poz2]);
digitalWrite(MOTOR2.in2, arrpoz[4][poz2]);
analogWrite(MOTOR2.enable, arrpoz[5][poz2]);
}
// обработка кода нажатия
void ir_go(long kod)
{
Serial.println(kod);
switch(kod)
{
case FORWARD : // направление вперед
POZ12.direction12=max(POZ12.direction12,8);
POZ12.poz1=POZ12.direction12;
POZ12.poz2=POZ12.direction12;
go12(POZ12.poz1,POZ12.poz2);
break;
case BACK : // направление назад
POZ12.direction12=min(POZ12.direction12,6);
POZ12.poz1=POZ12.direction12;
POZ12.poz2=POZ12.direction12;
go12(POZ12.poz1,POZ12.poz2);
break;
case SPEED_UP : // скорость++
POZ12.direction12=POZ12.direction12+arrpoz[6][POZ12.direction12];
POZ12.poz1=POZ12.direction12;
POZ12.poz2=POZ12.direction12;
go12(POZ12.poz1,POZ12.poz2);
break;
case SPEED_DOWN : // скорость--
POZ12.direction12=POZ12.direction12-arrpoz[7][POZ12.direction12];
POZ12.poz1=POZ12.direction12;
POZ12.poz2=POZ12.direction12;
go12(POZ12.poz1,POZ12.poz2);
break;
case LEFT : // влево
if(POZ12.direction12>6)
{
POZ12.poz1=POZ12.poz1-1;POZ12.poz1=max(POZ12.poz1,0);
POZ12.poz2=POZ12.direction12;
}
else
{
POZ12.poz1=POZ12.poz1+1;POZ12.poz1=min(POZ12.poz1,14);
POZ12.poz2=POZ12.direction12;
}
go12(POZ12.poz1,POZ12.poz2);
break;
case RIGHT : // вправо
if(POZ12.direction12>6)
{
POZ12.poz2=POZ12.poz2-1;POZ12.poz2=max(POZ12.poz2,0);
POZ12.poz1=POZ12.direction12;
}
else
{
POZ12.poz2=POZ12.poz2+1;POZ12.poz2=min(POZ12.poz2,14);
POZ12.poz1=POZ12.direction12;
}
go12(POZ12.poz1,POZ12.poz2);
break;
case CIRCLE_RIGHT : // кружение вправо
POZ12.poz1=POZ12.direction12;
POZ12.poz2=POZ12.direction12+arrpoz[8][POZ12.direction12];
go12(POZ12.poz1,POZ12.poz2);
break;
//case 3216 : // кружение влево
case CIRCLE_LEFT : // кружение влево
POZ12.poz1=POZ12.direction12+arrpoz[8][POZ12.direction12];
POZ12.poz2=POZ12.direction12;
go12(POZ12.poz1,POZ12.poz2);
break;
case STOP : // стоп
POZ12.poz1=7;
POZ12.poz2=7;
POZ12.direction12=7;
go12(POZ12.poz1,POZ12.poz2);
break;
default:
break;
}
}
Продолжение …. Часть 3