
Исследователи из Шанхайского университета транспорта (Shanghai Jiao Tong University) (Шанхай, Китай) представили RH20T — это крупнейший на сегодняшний день набор данных для обучения роботов различным навыкам.
Данные представляют собой видео и показания датчиков робота при выполнении различных задач в режиме телеуправления.
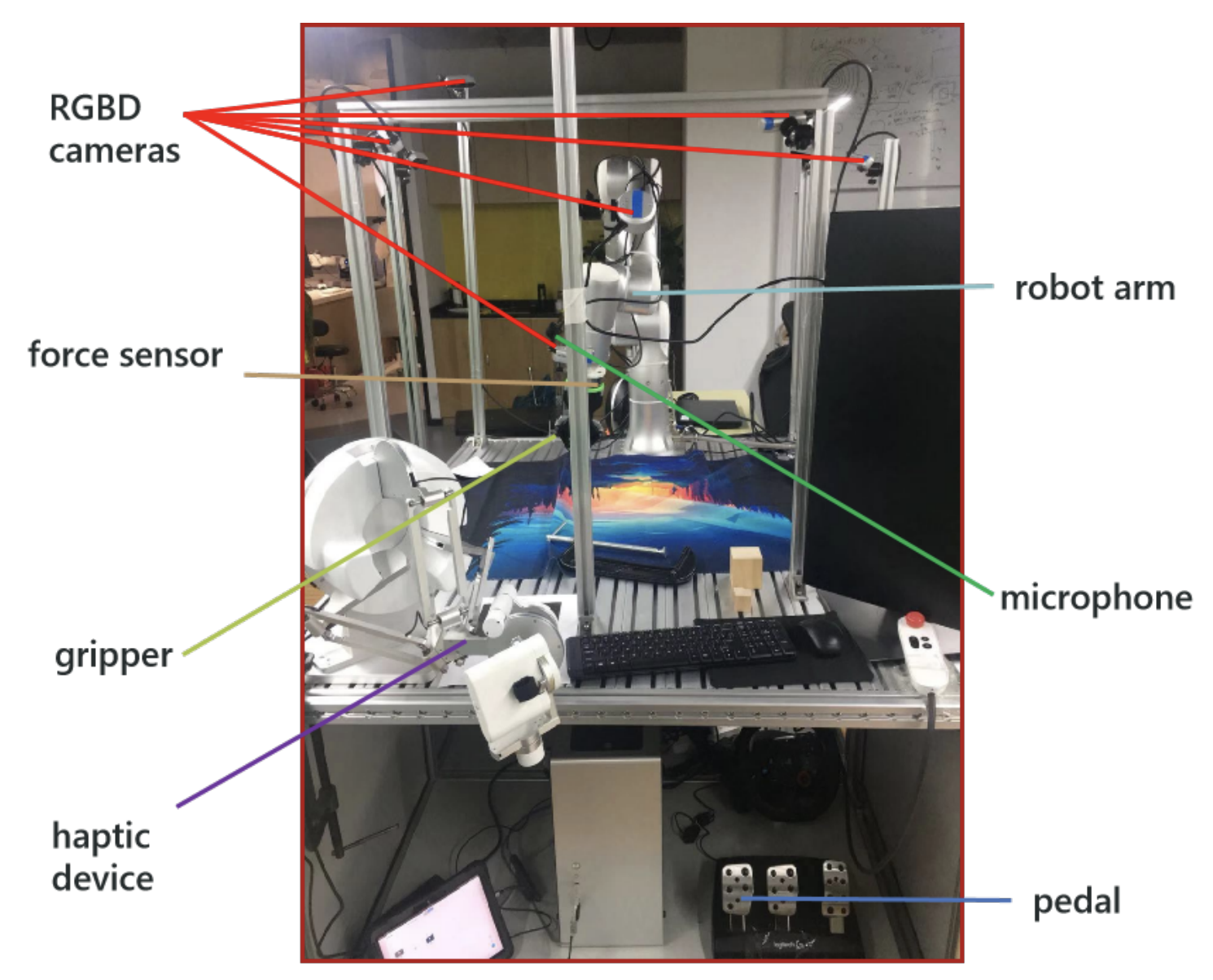
Для сбора данных использовалась специальная платформа, которая состояла из:
- роботизированной руки с захватом и силомоментным датчиком,
- 1-2 ручных камер,
- 8-10 глобальных RGBD-камер,
- 2 микрофонов,
- тактильного устройства и педалей — для оператора, который дистанционно управлял роботом.
Собрано около 110 000 последовательностей роботизированных манипуляций, что составляет более 40 миллионов кадров изображений для последовательностей роботизированных манипуляций и более 10 миллионов кадров для человеческих демонстраций. Каждая последовательность роботов содержит визуальную, тактильную, звуковую и проприоцептивную информацию.
Данные находятся в открытом доступе: rh20t.github.io и распространяются под несколькими лицензиями (поскольку частично финансировался компанией). Он разделен на две подгруппы: RH20T-C (коммерческий) и RH20T-NC (некоммерческий):
- подгруппа RH20T-C (эпизоды с названиями от «scene_0001» до «scene_0005») — распространяется по международной лицензии Creative Commons Attribution-ShareAlike 4.0 (CC BY-SA 4.0),
- подгруппа RH20T-NC (эпизоды с названиями от «scene_0006» до «scene_0010») — распространяется по некоммерческой лицензии Creative Commons Attribution 4.0 (CC BY-NC 4.0) — доступно для бесплатного некоммерческого использования.
Коммерческое использование комплекта RH20T-NC или моделей, обученных на нём, не допускается.
Статьи
- Fang H. S. et al. RH20T: A Robotic Dataset for Learning Diverse Skills in One-Shot //arXiv preprint arXiv:2307.00595. – 2023.
Ссылки
По теме
- Масштабирование и дистилляция для обучения роботов низкоуровневым манипуляциям
- ALOHA — система для обучения тонкой бимануальной манипуляции
- Метод ROSIE — «масштабирование обучения роботов с помощью семантически воображаемого опыта»
- RoboCat — проект системы для управления роботами-манипуляторами от Google Deepmind
- PickGPT позволяет операторам управлять роботом командами на естественном языке
- TidyBot — персонализированный робот-помощник на основе больших языковых моделей
- Microsoft предложила использовать ChatGPT для управления роботами
- PaLM-E — мультимодальная языковая модель для управления роботами