
Вариант робо-руки, конечно, может повторять простое сгибание-разгибание пальцев руки, но сможет ли эта робо-рука что-нибудь схватить? Что-то сомневаюсь 🙂
Что же делать, если хочется приделать к роботу захват, чтобы он мог принести банку пива или тапочки? Ведь, согласитесь — робот с рукой-манипулятором или хотя бы простым захватом, даёт больший простор для практического применения и экспериментов 🙂
Выход прост — использовать сервомашинку помощнее и готовый пластиковый зажим.

Кронштейн, который соединяет детали вместе можно вылепить из ПКЛ-а или вырезать из фанеры/оргстекла:
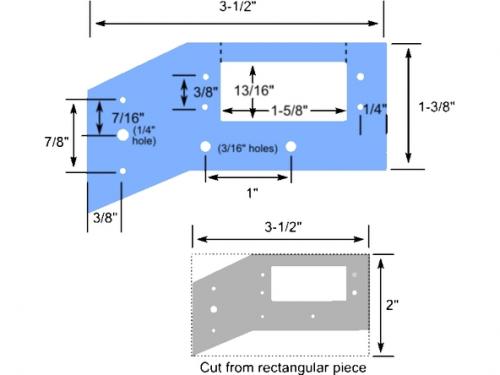
(картинка со странички проекта и размеры приведены в дюймах (1 дюйм = 2.54 см.) )
Качалка сервомашинки соединяется с противоположной рукояткой зажима при помощи проволоки от булавки
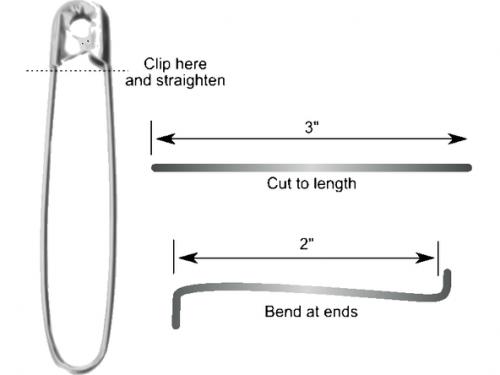
(в зависимости от требуемого усилия, думаю, можно использовать проволоку от больших канцелярских скрепок 😉 )
захват в сборе:

Ссылки
подробнее о проекте — Teleclaw: Remote Robot Gripper
По теме
Bilibot обзавёлся рукой
Универсальный захват для роботов
Адаптивный захват FESTO FinGripper
Festo ExoHand