

Как я уже писал, возможность преобразования одного типа данных в другой, является очень мощным механизмом Операционной Системы для Роботов — ROS.
Данная возможность позволяет использовать разные варианты и типы сенсоров, при этом, обрабатывая их данные одним и тем же алгоритмом.
Для преобразования облака точек, получаемых от сенсора Microsoft Kinect, в ROS уже есть готовый пакет — pointcloud_to_laserscan из стека Turtlebot-а.
Чтобы установить этот стек достаточно выполнить команду:
sudo apt-get install ros-electric-turtlebot-robot
Теперь, необходимо создать свой пакет, в котором создать файл запуска
kinect_to_laser.launch
следующего содержания:
Рассмотрим содержимое файла:
— запуск openni_node.launch, который начинает работать с Kinect
— запуск узла openni_manager (типа nodelet), который является контейнером для всех остальных nodelet-ов
nodelet — почти как обычные Узлы (Nodes), но вместо того, чтобы создавать новый процесс они подгружаются в родительский Узел типа nodelet, что позволяет им очень эффективно обмениваться данными друг с другом.
Затем идёт запуск двух nodelet-ов из Стека turtlebot-а: pointcloud_throttle и kinect_laser.
nodelet pointcloud_throttle — регулирует частоту выдачи облака точек (pcl::PointCloud
Т.о. pointcloud_throttle передаёт облако точек в cloud_throttled из /camera/depth/points с частотой 2 Гц.
подробности можно посмотреть в исходнике pointcloud_to_laserscan/src/cloud_throttle.cpp:
https://kforge.ros.org/turtlebot/turtlebot/file/tip/pointcloud_to_laserscan/src/cloud_throttle.cpp
nodelet kinect_laser — вырезает горизонтальный отрезок из каждого облака точек cloud_throttled, в столбцах которого выбирается ближайшее расстояние (глубина) и публикует в топик scan.
Этот nodelet поддерживает несколько параметров, которые определяют размер и расположение среза, который используется для получения данных лазерного сканирования, но используются их значения установленные по-умолчанию.
Т.о. узел pointcloud_to_laserscan (типа nodelet), считывает данные типа pcl::PointCloud
Детальнее процедуру преобразования можно посмотреть в исходнике pointcloud_to_laserscan/src/cloud_to_scan.cpp :
https://kforge.ros.org/turtlebot/turtlebot/file/tip/pointcloud_to_laserscan/src/cloud_to_scan.cpp
nodelet — это пакет, разработанный для запуска разных алгоритмов в одном процессе, что позволяет не тратить ресурсы на копирование данных между ними.
ROS — это распределённая система, в которой каждая программа (Узел — Node) — это отдельный процесс, который может выполняться на разных машинах и обмениваться данными через Сообщения (Message) поверх TCP- или UDP-протокола (TCPROS, UDPROS).
Т.о. обмен данными между узлами сопряжён с накладными расходами сериализации и передачи данных, а если данные объёмные (как, например, изображение с камеры или облако точек от сенсора Kinect), то затраты на передачу данных между узлами становятся очень существенными.
Поэтому и были разработаны nodelet-ы — чтобы не тратить ресурсы на копирование данных между процессами, работающими на одной машине, а запускать алгоритмы в одном процессе, что позволяет им получать доступ к данным без затрат на копирование.
Для удобства, я уже создал пакет (robocraft_kinect) содержащий файл запуска kinect_to_laser.launch, в репозитории
http://code.google.com/p/robocraft-ros-pkg/
Можете скачать этот пакет к себе, например, в директорию ros_tutorials, которую вы создавали при прохождении уроков по ROS.
Или скачать все пакеты в директорию robocraft-ros-pkg командой
svn checkout https://robocraft-ros-pkg.googlecode.com/svn/trunk/ robocraft-ros-pkg
затем прописать эту директорию в свой setup.sh в переменную окружения ROS_PACKAGE_PATH
1. Откроем новый терминал и запустим roscore
2. Используем файл запуска:
roslaunch robocraft_kinect kinect_to_laser.launch
3. посмотрим, какие топики появились в системе:
rostopic list
получим следующий список:
/camera/depth/camera_info /camera/depth/disparity /camera/depth/image /camera/depth/image/compressed /camera/depth/image/compressed/parameter_descriptions /camera/depth/image/compressed/parameter_updates /camera/depth/image/theora /camera/depth/image/theora/parameter_descriptions /camera/depth/image/theora/parameter_updates /camera/depth/image_raw /camera/depth/image_raw/compressed /camera/depth/image_raw/compressed/parameter_descriptions /camera/depth/image_raw/compressed/parameter_updates /camera/depth/image_raw/theora /camera/depth/image_raw/theora/parameter_descriptions /camera/depth/image_raw/theora/parameter_updates /camera/depth/points /camera/rgb/camera_info /camera/rgb/image_color /camera/rgb/image_color/compressed /camera/rgb/image_color/compressed/parameter_descriptions /camera/rgb/image_color/compressed/parameter_updates /camera/rgb/image_color/theora /camera/rgb/image_color/theora/parameter_descriptions /camera/rgb/image_color/theora/parameter_updates /camera/rgb/image_mono /camera/rgb/image_mono/compressed /camera/rgb/image_mono/compressed/parameter_descriptions /camera/rgb/image_mono/compressed/parameter_updates /camera/rgb/image_mono/theora /camera/rgb/image_mono/theora/parameter_descriptions /camera/rgb/image_mono/theora/parameter_updates /camera/rgb/image_raw /camera/rgb/image_raw/compressed /camera/rgb/image_raw/compressed/parameter_descriptions /camera/rgb/image_raw/compressed/parameter_updates /camera/rgb/image_raw/theora /camera/rgb/image_raw/theora/parameter_descriptions /camera/rgb/image_raw/theora/parameter_updates /camera/rgb/points /cloud_throttled /kinect_laser/parameter_descriptions /kinect_laser/parameter_updates /openni_manager/bond /openni_node1/parameter_descriptions /openni_node1/parameter_updates /rosout /rosout_agg /scan /tf
4. Полюбуемся результатом работы при помощи мощной программы визуализации — rviz
rosrun rviz rviz
Первым делом, укажем программе rviz базовую систему отсчёта.
Для этого, в области глобальных настроек:
.Global Options
щёлкаем напротив Fixed Frame и в появившемся списке доступных систем отсчёта выбираем
/openni_camera
5. Добавляем визуализатор лазерного дальномера: щёлкаем внизу на кнопке Add и из списка объектов визуализации выбираем лазерный сканер:
Laser Scan
, выбираем для визуализатора источник данных — Топик /scan
орты системы координат(Axis) и сетку(Grid) — можно добавить таким же образом
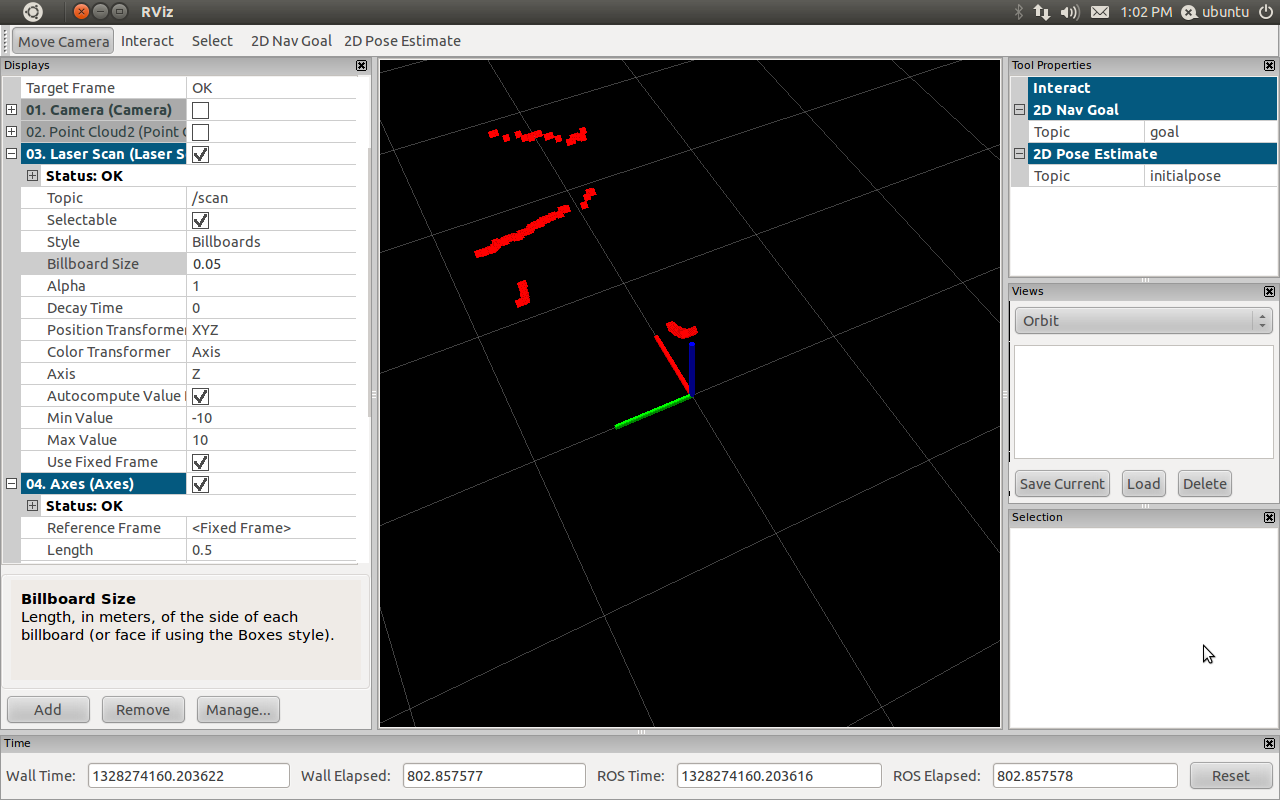
— цвет и вид отображения данных лазерного сканера регулируется в области настроек.
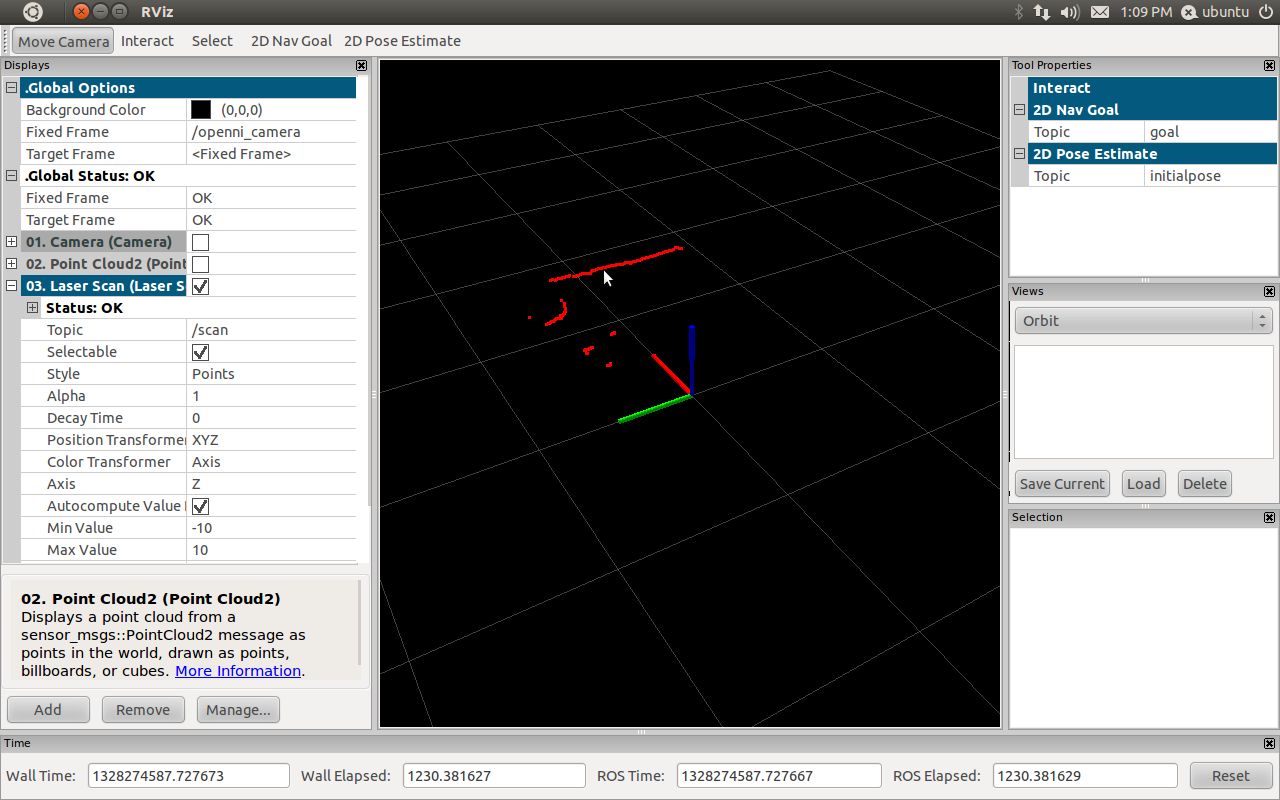
6. Дополнительно выведем текущее облако точек, на котором хорошо видны красные точки лазерного сканера

Видим, что логика преобразования облака точек в данные лазерного дальномера очень проста — из всего облака точек, выбирается горизонтальный отрезок, в столбцах которого выбирается ближайшее расстояние (глубина).
Отключим облако точек, так его визуализация несколько подтормаживает 🙂
Красота!
продолжение следует…
Ссылки
http://www.ros.org/wiki/turtlebot
http://www.ros.org/wiki/pointcloud_to_laserscan
формат roslaunch .launch/XML
http://www.ros.org/wiki/rviz
2d SLAM with ROS and Kinect
По теме
Что же такое ROS?
Юбилей Kinect-а
Работа с Kinect под ROS
0 комментариев на «“Работа с Kinect под ROS — часть 2 — преобразование облака точек в данные лазерного дальномера”»
поздравляю с успехом!