
Принцип работы роботов-пылесосов iRobot
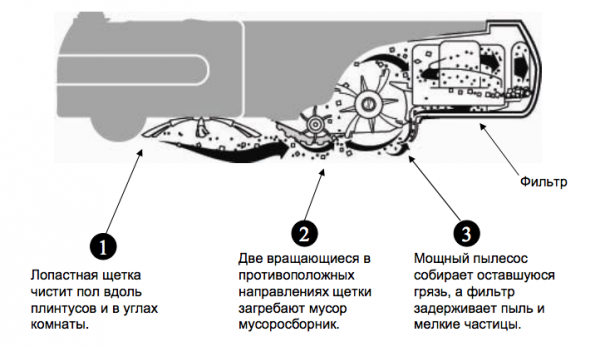
Саморегулируемый чистящий модуль
Обратите внимание на эту саморегуляцию; при разборке пылесоса она оказалась реализована очень просто — при помощи простой… верёвочки 🙂
Защита длинного ворса
Снижение скорости перед препятствиями
Датчики предотвращения падения
(на переднем бампере 4 таких ИК-датчика)
Уборка вдоль стен и в углах
с правой стороны бампера находится ещё один ИК-датчик
Датчики сильного загрязнения
хм… пока не совсем понятен принцип работы этого датчика (я его сначала за магнит принял — типа металлический мусор задерживать)
Если аккумулятор разряжается во время уборки, робот автоматически возвращается на базовую станцию для подзарядки
ИК-излучатель базовой станции и ИК-приёмник робота
«Виртуальная стена» предотвращает выход робота из комнаты
Тот же ИК-приёмник реагирует на излучение станций «виртуальных стен»
Область покрытия робота-пылесоса
Модульный дизайн последних версий роботов-пылесосов
Как видно, компания iRobot учла нюансы предыдущих версий роботов-пылесосов и делает новые версии модульными, что позволяет легко разбирать и чистить робот-пылесос
Видео работы Roomba Sage 4110 (7 причин, по которым вам нужен робот-пылесос)
По теме
видео о разборке робота-пылесоса
0 комментариев на «“Демонстрационные ролики принципов работы роботов-пылесосов iRobot”»
Он не слишком сильно шумит ??
нет 🙂 во-всяком случае, та модель что у меня — Roomba Sage 4110 работает, по сравнению с обычным пылесосом, очень тихо.
Разные модели шумят по-разному, как правило до 65 Дб. Например, у моей модели Sititek Robo-sos LR-450 максимум 45 Дб, но еще есть функция день/ночь. Если выставишь режим «после 18.00», то он вообще бесшумно убирать будет.
отличная вещь, очень практичная! ползает дома уже больше года.
Чего не хватает — подсветки (фар), так как в тёмном коридоре есть шанс наступить на него во время уборки, ну и багофича — наматывает волосы на подшипники валиков вплоть до клина(снимаются руками во время чистки)
очень хочется моторизировать обычный пылесос — навесить датчиков и твиттер ))
а аккумулятор всё тот же?
у пылесоса конечно уже есть колёса, но чтобы его моторизировать скорее придётся робота-андроида делать 🙂
к тому же, мощности обычных пылесосов никак не позволяют сделать их мобильными. А так да — тоже думал к обычному пылесосу моторов навесить 🙂