

После просмотра промо-роликов меня не покидал вопрос — является ли робот пылесосом или просто щёткой?
Разберём и посмотрим 🙂
Подробности процедуры разбора робота-пылесоса можно посмотреть на видео, а я отмечу некоторые нюансы.
Вот он наш пациент

Это пимпа на носу робота — световод, для приёма сигналов от виртуальных стен и зарядной станции.

по правому борту бампера датчик стены (чтобы робот мог двигаться и совершать уборку вдоль стены)

поставим пациента на бок и под действием пружин колёса сразу выходят

переворачиваем робота на спину
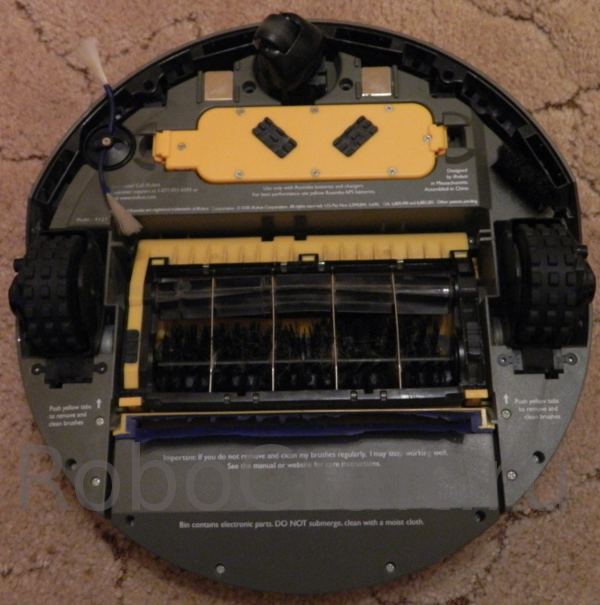
— видно четыре щели под бампером — это датчики пола (чтобы робот не падал с лестниц)
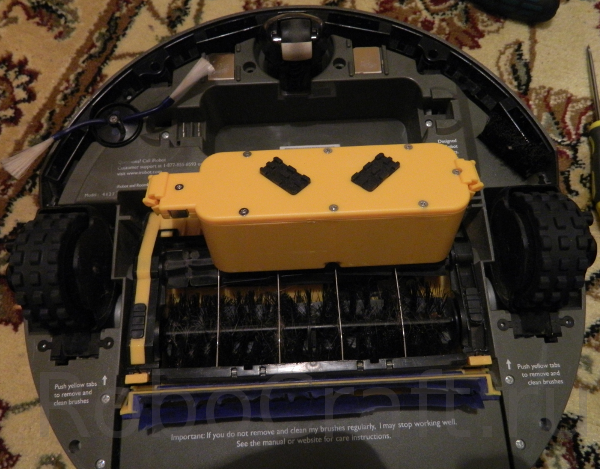
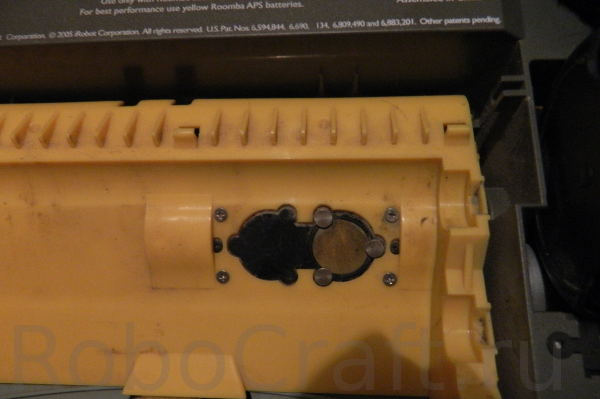
жёлтая штуковина за передним колесом — это аккумулятор (14.4V (Ni-MH))
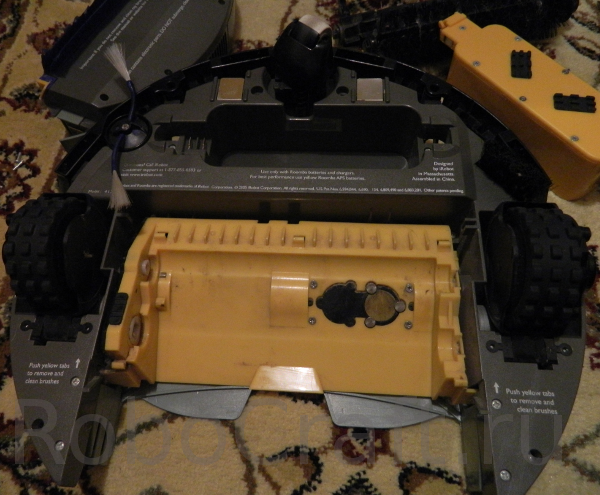
переднее подруливающее колесо и аккумулятор крупным планом.
Видны контакты для подзарядки от базовой станции

Аккумулятор, я покупал отдельно и, возможно, он отличается от стандартных, т.к. я находил упоминания о том, что стандартный аккумулятор закручиваются болтами с шлицом под отвёртку треугольной формы.
одна из прорезей для датчиков пола

робот, со снятым аккумулятором
робот, со снятым бампером

— видна возвращающая пружина бампера.
Отмечу, что датчики касания у бампера — не обычные кнопки, а те же фото-элементы.
бампер подключается к роботу через один разъём

отстёгиваем контейнер
Контейнер для сбора мусора
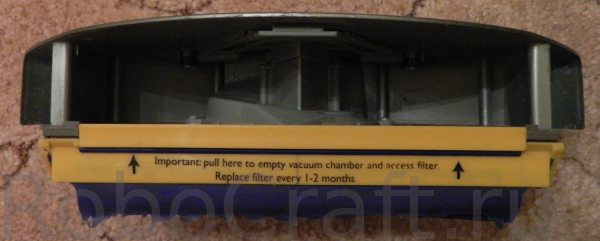
вытаскиваем фильтр

видно отверстие для всасывания воздуха
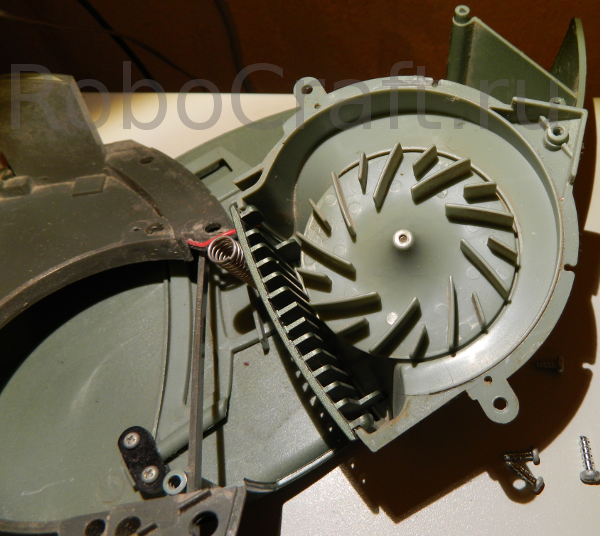
открутим нижнюю крышку контейнера

а теперь верхнюю

— видим моторчик, который и является «пылесосом» 🙂
вот она — крыльчатка пылесоса
Возвращаемся к роботу 🙂
Датчик «сильного загрезнения»
снимаем верхнюю крышку робота. Она опять же подключается к роботу через один разъём (шлейф от кнопок управления и светодиодной индикации)
— обратите внимание сколько мусора скапливается во внутренностях робота
левая сторона, виден динамик и колесо, подтянутое пружиной

— так же видна одна из множества стяжек, обильно используемых для фиксации проводки робота 🙂
надавим на колесо, приведя его в рабочее положение

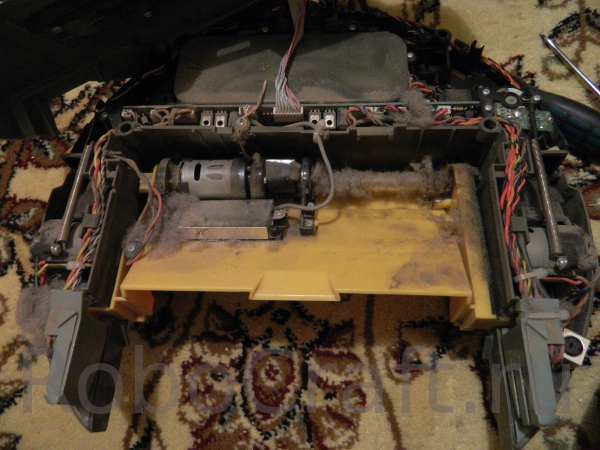
центральная часть, освобождённая от скопившегося мусора.
Это моторчик с редуктором, вращающий шётку
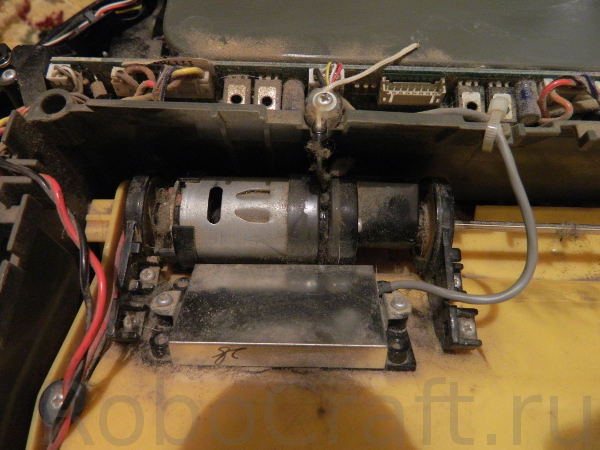
— блестящая коробка — это сенсор сильного загрязнения
в верхней части видна «материнская плата» робота, на которой выглядывают мощные транзисторы (скорее всего — драйвера двигателей).
Как видим, большая часть робота — это аккумуляторный отсек и «жёлтая часть» щётки
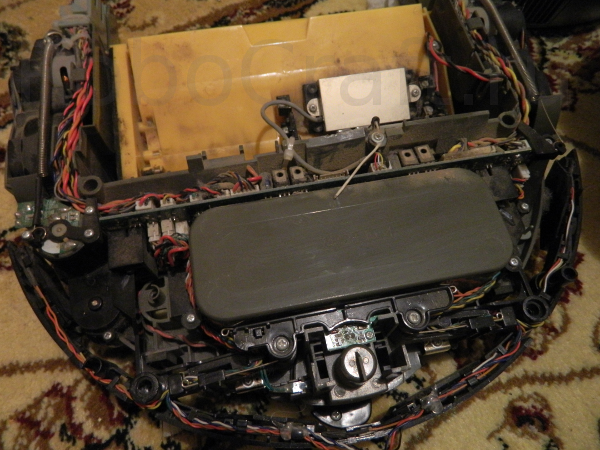
— слева — моторчик, приводящий в движение «подгребающую» щётку.
как я уже упоминал, мотор-редуктор щётки подвешен на верёвочке — тем самым достигается его авторегуляция 🙂
Правая сторона, колесо и консольный разъём mini-DIN-7, через который можно управлять роботом.
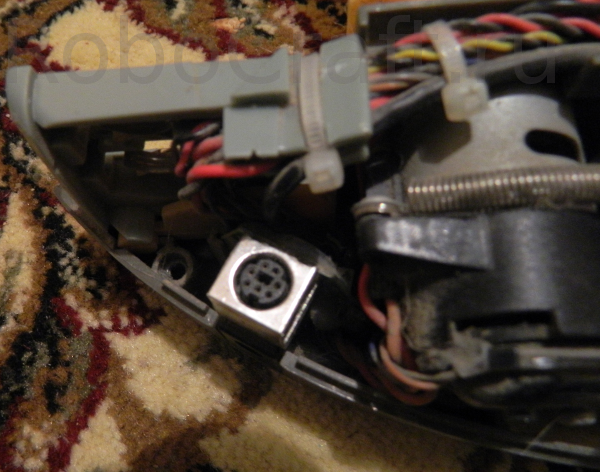
— именно через этот разъём можно управлять роботом, добавив ему более мощный интеллект на Arduino или ПК.
далее: Управление роботом-пылесосом iRobot Roomba с помощью Arduino
Ссылки
Купил себе робота-пылесоса 🙂
Демонстрационные ролики принципов работы роботов-пылесосов iRobot
Подробное видео о вскрытии робота-пылесоса Roomba 4000
Автор: Vladimir (noonv), 2011
Эксклюзивно для robocraft.ru
копирование на другие ресурсы и публикация
без разрешения автора запрещены.
0 комментариев на «“Разбираем робот-пылесос iRobot Roomba Sage 4110 (много фоток)”»
Мне больше нравится определение «электровеник». Там не слишком серьезный моторчик для всасывания.
Может кто подскажет, у меня румба чуть постарее этой (roomba floor vac) и консольного разъема на ней нет, хотелось бы к ней подключится, если кто знает как это сделать подскажите плиз