
ПРОДОЛЖЕНИЕ — начало здесь
Составляем программу дла Android-устройства
Используем Eclipse с плагином ADT (Android Development Tools)
Останавливаться на особенностях программирования не буду — кому интересно — ссылка на архив проекта — скачать (программа писалась быстро — разметка под мой планшет, но кому надо — можно подправить)
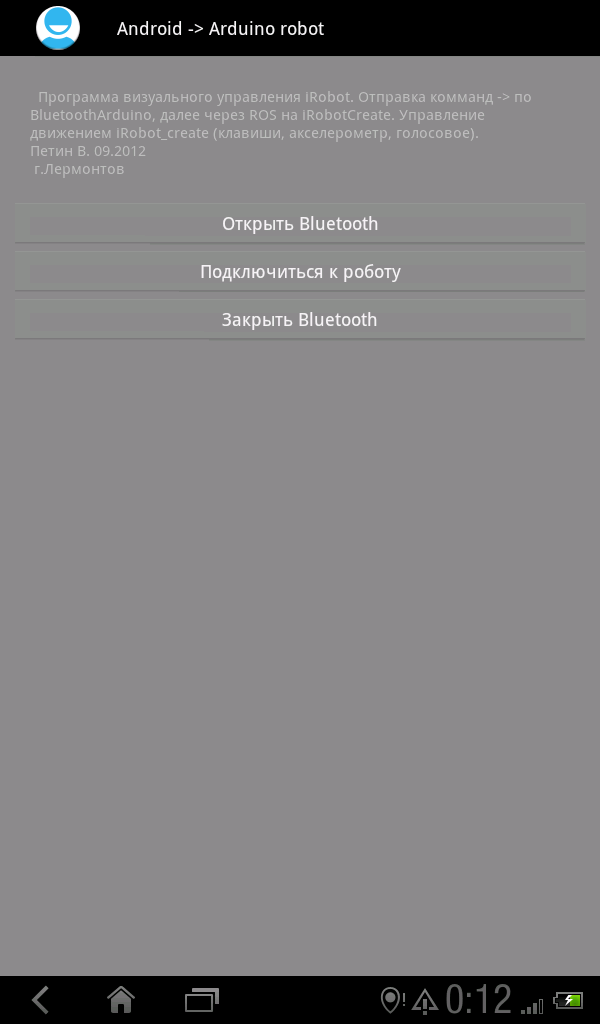
Главное меню программы
Далее происходит поиск ближайших устройств Bluetooth — выбираем наше — при программировании я его назвал iRobot1
Далее попадаем в меню управления роботом
Программа формирует последовательности байт согласно документации по открытому интерфейсу — см. документацию(англ)
Например 145 0 100 0 200 — движение левое колесо скорость 100мм/сек, правое — 200 мм/сек
Три способа отправки команд
— нажатие на кнопки управления
— (при выборе чекбокса — при этом блокируются кнопки)
— голосовое управление (используется API Google Speech) — необходимо интернет-подключение
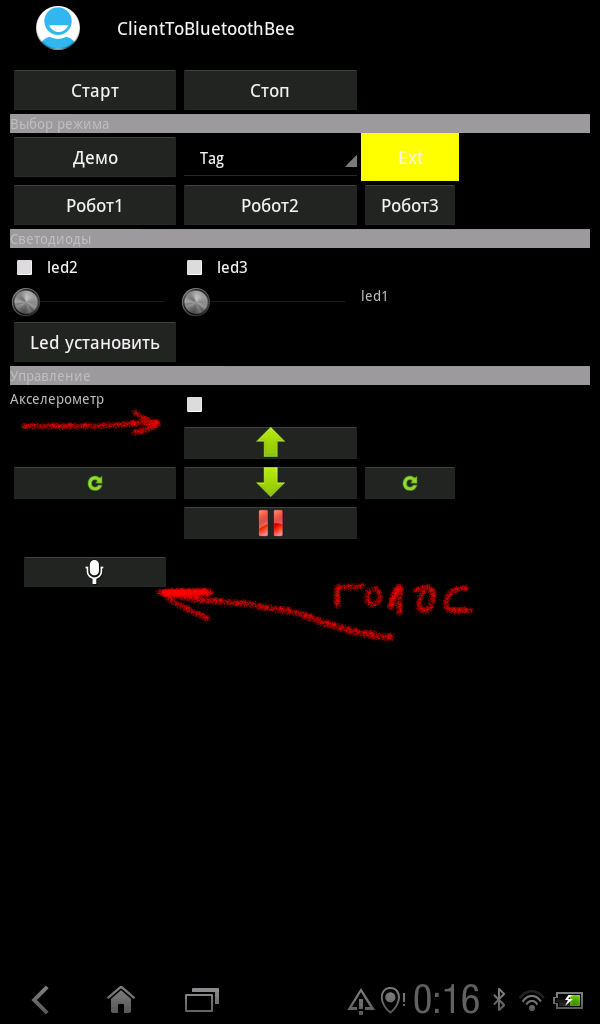
Кнопки Robot1, Robot2, Robot3 (127 1, 127 2,127 3)предусмотрены для запуска автономных программ робота, при отправке последовательностей скетч Arduino блокирует отправку в ROS всех последовательостей (до получения последовательности 127 0 (кнопка Ext))
Далее продолжение — скетч Arduino