Всем привет.
В этой статье я расскажу как создать своего автономного трехколесного робота.
Что нам понадобится:
Железо:
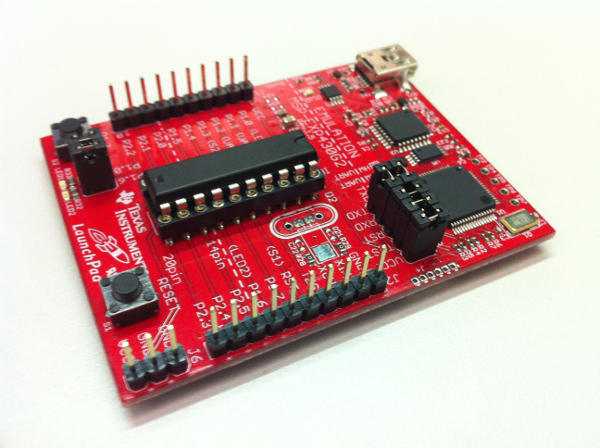
1. MSP430 launchpad от Texas Instruments с микроконтроллером M430G2553. Это будет мозгом нашего робота
2. Ультразвуковой датчик расстояния HC-SR04. Мы напишем драйвер под него. Датчики будет «глазами» робота.

3. 2 Двигателя с колесами и редукторами можно легко купить в магазине Робокрафт Вот ссылка Двигатель
4. 6 аккумуляторов АА и батарейный отсек для них.

5. Драйвер двигателя на базе микросхемы L298 или L293

6. Проводки

7. Переднее колесо-ролик

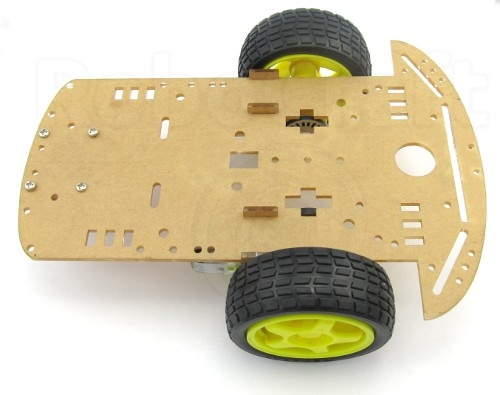
8. Основа для колесной платформы
(внимание по ссылке вот такой комплект:
1 х акриловая платформа
2 х мотор-редуктора
2 х колеса с шиной
2 х кодирующих диска
1 х универсальное колесо
1 х батарейный отсек на 4 батарейки типа АА
все необходимые элементы крепления (винты, гайки и др.))
Программная часть:
1. Тут все наши микроконтроллерные потребности полностью удовлетворит универсальный редактор PlatformioIDE

Итак поехали.
Начнем с железной части.
Берем наш Launchpad и HC-SR04.
Подсоединяем в таком порядке:
Launchpad HC-SR04
GND GND
VCC VCC
P1.4 TRIG
P1.5 ECHO
Готово! Датчик подключен. Позже я напишу как написать под него простой до жути драйвер и снимать с него показания.
Далее подключаем драйвер двигателей и сами двигатели.
Берем модуль L293/L298
Выходы OUT1 и OUT2 соединяем с правым двигателем.
Выходы OUT3 и OUT4 соеденяем с левым двигателем.
Двигатели подключены.
Теперь поключим Launchpad.
Launchpad L293/L298
+5v +5v/VSS
GND GND
P2.0 Enable1
P2.1 In1
P2.2 In2
P2.3 Enable2
P2.4 In3
P2.5 In4
Отлично. теперь подключим питание от аккумляторного отсека на драйвер двигателей.
Для полного счастья осталось только запитать наш Launchpad.
Тут, товарищи, есть несколько вариантов.
1. Взять питание от батарейного отсека. Пропустить его через стабилизатор 7805 и получить желанные 5 вольт.
2. Взять понижающий преобразователь

3. Использовать PowerBank для телефонов.
Вариантов много.
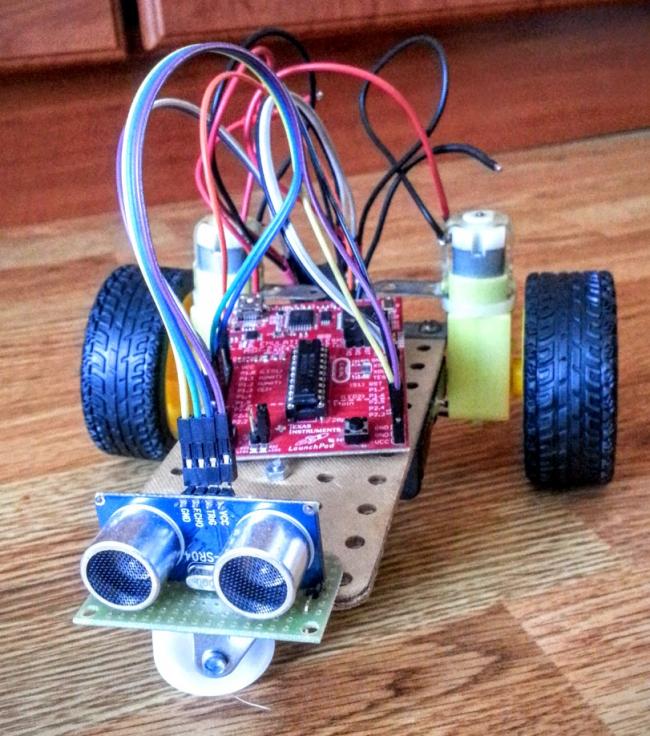
С железной частью закончили.
В итоге должно получиться что то такое.