
Исследователи из Nvidia представили модель HOVER (Humanoid Versatile Controller — Гуманоидный универсальный контроллер), предназначенную для управления телом робота.
Ключевой аспект использования модели HOVER состоит в том, что модель обеспечивает универсальное управление роботом-андроидом (командами с джойстика, экзоскелета, системы захвата движений и т.п.) с помощью унифицированного многорежимного командного пространства, которое поддерживает отслеживание кинематического положения тела робота, отслеживание локальных углов его сочленений и отслеживание базы робота, позволяя выборочно активировать различные командные пространства для выполнения различных задач.
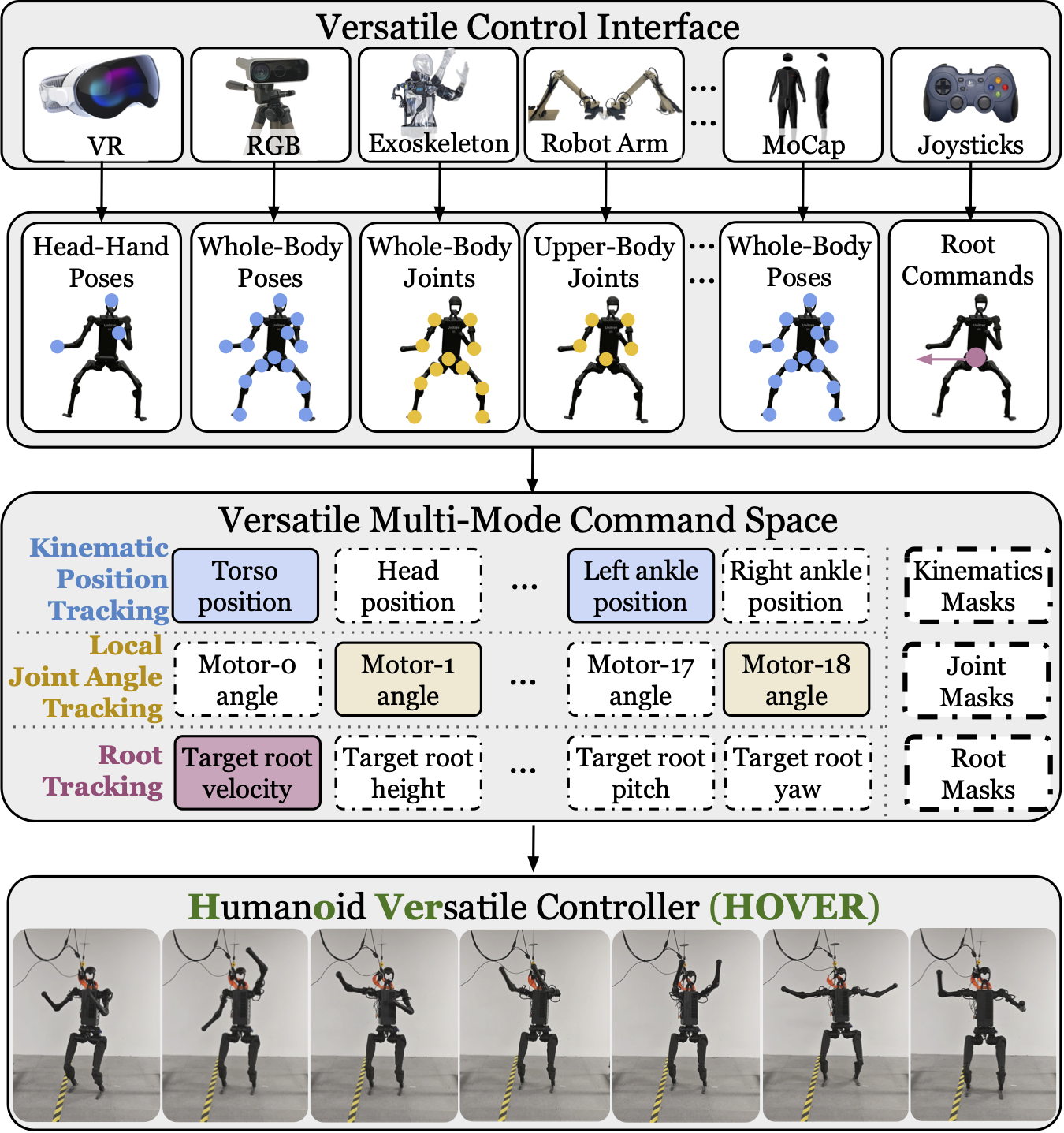
Всего модель поддерживает 15 командных режимов для гуманоидного робота с 19 степенями свободы (Unitree H1).
Обучение модели происходило в симулятора NVIDIA Isaac.
Для эффективного распределения двигательных навыков используется процедура дистилляции, которая объединяет различные режимы управления в единую стратегию.
Статьи
- He T. et al. HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots //arXiv preprint arXiv:2410.21229. – 2024.
Ссылки
По теме