
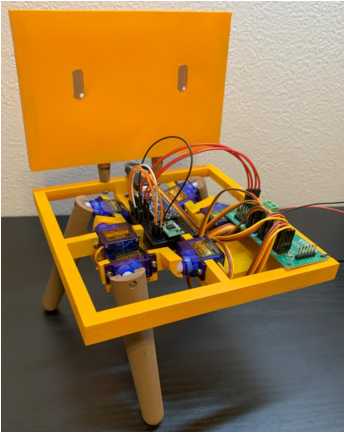
Исследователи с Кафедры механоинформатики (Высшая школа информационных наук и технологий, Токийский университет (Токио, Япония)) сконструировали трёхногий стул, который самостоятельно учится ходить.
В качестве прототипа робота, использовался персонаж маленького трёхногого стула из аниме «Судзумэ, закрывающая двери».
Тело робота состоит из трёх ног, расположенных асимметрично по отношению к центру, что вызывает дополнительные сложности с балансировкой:
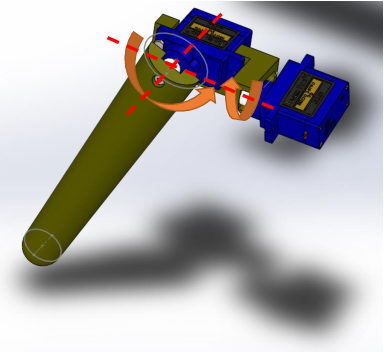
Каждая нога обладает всего 2-мя степенями свободы (DOF), что позволяет ноге двигаться вперед, назад, влево и вправо:
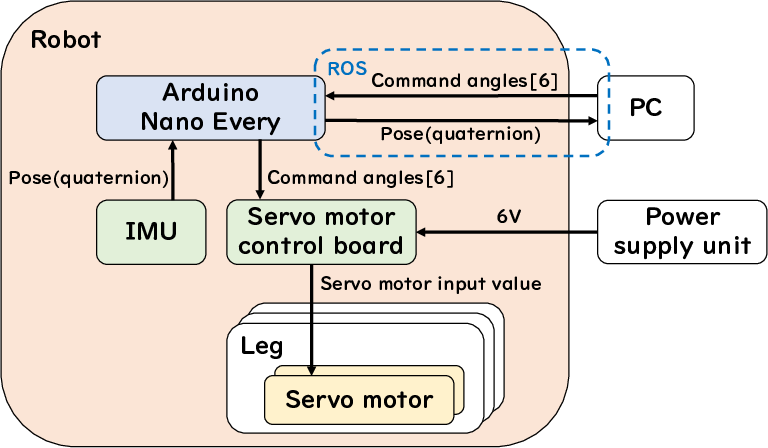
Блок-схема системы управления роботом
Спинным мозгом робота является контроллер Arduino Nano Every, который получает от компьютера командные углы для 6 сервомашинок, а назад передаёт кватернион своего положения (получает его от IMU — Adafruit BNO055).
Для обмена данными и управления используется ROS. Обмен данными идёт с частотой 10 Гц.
Авторы проанализировали, как в таком ассиметричном роботе формируется походка (при ходьбе и при движениях чтобы встать), для этого движения генерировались двумя разными методами:
- используя линейную интерполяцию ключевых поз (connecting essential postures);
- методом проб и ошибок с использованием обучения с подкреплением (reinforcement learning). Обучение велось в симуляторе Isaac Gym с отражением его на реального робота.
Оба метода смогли создать интересную походку, аналогичную ходьбе, но метод обучения с подкреплением выдавал более стабильную походку.
Код робота открыт и доступен для изучения.
Статьи
- Shintaro Inoue, Kento Kawaharazuka, Kei Okada, Masayuki Inaba Body Design and Gait Generation of Chair-Type Asymmetrical Tripedal Low-rigidity Robot
Ссылки
- Сайт: https://shin0805.github.io/chair-type-tripedal-robot/
- Код: https://github.com/shin0805/Chair-TypeAsymmetricalTripedalRobot
По теме