
µSpeech — распознавание речи на Arduino
Распознавание речи, находится, как правило, в компетенции довольно мощных компьютеров с процессорами на сотни мегагерц и сотнями мегабайт оперативной памяти. Однако, Arjo Chakravarty, создал библиотеку распознавания речи, специально для маломощных контроллеров типа контроллера Ardunio.
Библиотека μSpeech для Arduino, обеспечивает распознавания речи для ограниченного набора голосовых команд.
Там, где большинство систем распознавания речи используют FFT (Быстрое преобразование Фурье) и много необычный математики, для определения, используемых фонем, библиотека Arjo избегает этой ненужной сложности и использует только основы интегрального и дифференциального исчисления.
Из руководство по эксплуатации μSpeech, можно увидеть, что для работы требуется подключить небольшой электретный микрофон к аналоговому входу Arduino и принимать голосовые команды, такие как ‘left’, ‘right’, и ‘stop’. Точность срабатывания — 80% для слов, и 30-40% для одной фонемы.
Подробности: uSpeech
руководство по μSpeech (eng, PDF)
ArduinoPi
http://www.youtube.com/watch?v=Eiu-zppEsi4
ArduinoPi — концепция, показывающая как можно использовать веб-браузер для запуска событий в Arduino с помощью Raspberry Pi
Подробности: ArduinoPi 1.0 includes an API
ROS: новый пакет — rosserial_embeddedlinux
Paul Bouchier представил новый пакет — rosserial_embeddedlinux — это часть стека rosserial, которая предоставляет возможность запуска узлов ROS на встраиваемых Linux-системах.
Пакет rosserial_embeddedlinux, позволяет использовать ROS с системами Linux, на которых не может быть запущен полноценный ROS. Для этого, пакет предоставляет протокол связи ROS, который работает над последовательным соединением (UART), Ethernet или Wi-Fi вашей встраиваемой Linux-системы, которая взаимодействует с прокси-приложением, работающим на родной системе ROS.
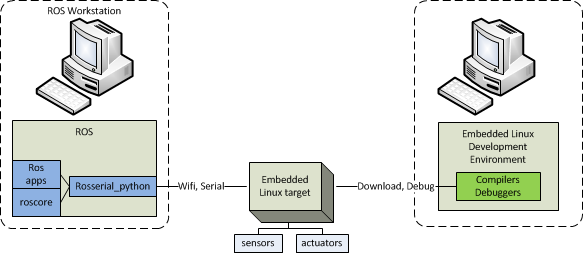
Это позволяет использовать ваши встраиваемые Linux-системы для запуска приложений, работающих в связки с полноценными узлами ROS: оно может публиковать и подписываться на ROS-темы и запускать сервисы.
rosserial_embeddedlinux расширяет код rosserial_arduino, который позволяет Arduino представлять узел ROS. Так же, он поддерживает несколько узлов.
Подробности: http://ros.org/wiki/rosserial_embeddedlinux
rosserial_embeddedlinux / Tutorials
ROS: rviz на Android
Adam Zimmerman из Университета штата Иллинойс (University of Illinois), создал версию Rviz для планшетов Android.
Rviz — это программа визуализации используется в ROS, чтобы представить наглядное представление и помочь понять работу робототехнических систем. Для этого испольщуется 3D-среда, которая позволяет пользователям видеть мир с точки зрения робота.
Подробности: Rviz for Android
Самодельный робот для ухода за комнатными растениями

Робот-горшок Plantbot выглядит забавнее, но эту робо-тележку от бельгийского скульптора Stephen Verstraete, позволяющую комнатным растениям следовать за Солнцем, кажется сделать намного проще.
Благодаря фотодатчикам, тележка разыскивает наиболее освещённое место, для расположения цветка.
Принципиальная схема:
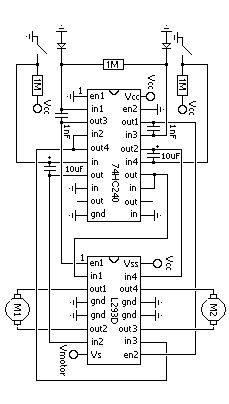
Как видим, в качестве драйвера двигателей используется популярная L293D.
Подробности: Plant Host Drone
Биоинспирированный робот-червяк
Исследователи из Центра Исследования Биологически Инспирированной Робототехники при Case Western Reserve University, представили несколько инновационных проектов нового вида робота, который использует для передвижения непрерывную волновую перистальтику (метод, который используют дождевые черви).
Перистальтика(греч. — обхватывающий и сжимающий) — волнообразное сокращение стенок полых трубчатых органов (пищевода, желудка, кишечника и др.), способствующее продвижению их содержимого к выходным отверстиям.
Перистальтические волны образуются за счет ускорения и замедления соответствующих сегментов робота.
Подробности: Continuous Wave Peristaltic Locomotion
Компьютерное зрение с использованием человеческого мозга

DARPA представило уникальную систему компьютерного зрения. Уникальность системы состоит в использовании ЭЭГ-сигналов с человеческого мозга, для уточнения распознавания объектов.
Название проекта крайне многообещающее: Система предупреждения об угрозах с использованием когнитивных технологий (Cognitive Technology Threat Warning System, CT2WS). На данный момент, система состоит из 120-мегапиксельных камер, радара, кластера компьютеров для распознавания объектов и операторов со сканерами мозговой активности.
К системе компьютерного зрения, настроенной на поиск «подозрительных объектов», подключают одного или нескольких операторов — и быстро прокручивают перед ними кадры с объектами, найденными программой распознавания образов. У операторов при этом снимают электроэнцефалограмму с помощью специальных ЭЭГ-сканеров. Если человек видит на экране опасность — это сразу заметно на ЭЭГ.
По заявлению DARPA, оператору способен обрабатывать до 10 изображений в секунду, без снижения точности распознавания. Главным плюсом такой системы является снижение количества ложных срабатываний (с 810 до 5 в час).
Подробности: DARPA combines human brains and 120-megapixel cameras to create the ultimate military threat detection system
Отечественный ответ Boston Dynamics — робототехнический комплекс двойного назначения
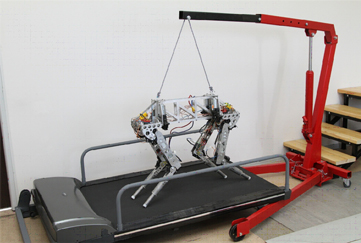
Не только Boston Dynamics в рамках DARPA занимается созданием четвероногих роботов, но и отечественная компания — НПО Андроидная Техника разрабатывает схожие комплексы двойного назначения:
Целью выполнения работы является разработка конструкции, аппаратной и программной части промышленного автономного образца робототехнического комплекса двойного назначения, основанного на транспортной платформе.
Основное назначение комплекса направлено на использование в условиях пересеченной местности с полезной нагрузкой до 80 кг и скоростью до 6км/ч и до 10 км/ч по равнинной местности, радиусом действия до 25 км, а так же для выполнения разведывательных операций в условиях пересеченной местности и транспортировку различных грузов. Актуальной задачей для разработчиков на сегодняшний день является достижение скоростных характеристик комплекса 25-30 км/ч.
Окончание проекта запланировано в 2014 году.
Подробности: Уникальный проект для Российской Федерации-робототехнический комплекс двойного назначения