
Generative Expressive Motion (GenEM) — Генеративное выразительное поведение — новый метод от Google DeepMind по созданию выразительного поведения роботов с помощью больших языковых моделей (БЯМ, LLM).
Традиционно, для создания выразительного поведения роботов использовались системы, основанные на правилах или шаблонах. Разработчик робота, занимающийся программированием поведения, заранее составлял формализованный набор условий и соответствующего им поведения робота (пример — Творческий путь построения робота). Основная проблема подобных систем — это потребность вручную формировать необходимые модели поведения для каждого типа робота. Адаптация робота к новым ситуациям и предпочтениям пользователей требует перепрограммирования, так как изначально система имеет жёстко заданные шаблоны поведения.
Совсем недавно для создания выразительного поведения, исследователи экспериментировали с подходами, основанными на машинном обучении, что позволяет сделать поведение роботов более гибкими. Но и у этого подхода есть недостаток — необходимость формирования специализированных наборов данных для каждого типа роботов и видов социального взаимодействия, в которых используется определённое поведение.
Основная идея методики GenEM — использовать знания, заложенные в LLM, для динамического создания выразительного поведения. Таким образом, использование LLM позволяет обойтись без создания длинного списка правил и дополнительного обучения специализированных моделей машинного обучения.
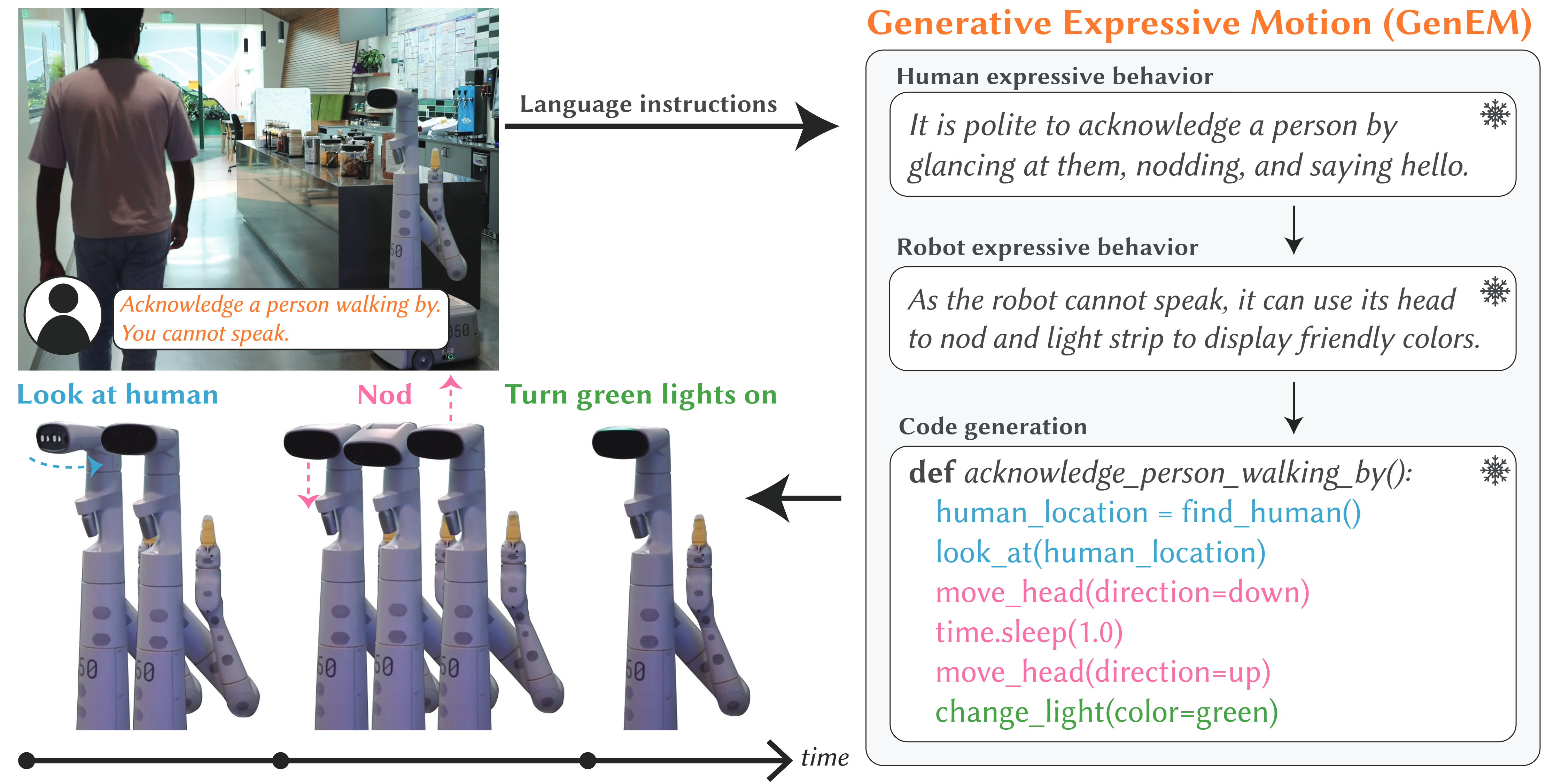
«GenEM может создавать мультимодальное поведение, которое использует доступные возможности робота (речь, движения тела и другие визуальные функции, (световые полосы)) для эффективного выражения намерений робота».
«Одним из ключевых преимуществ GenEM является то, что он реагирует на живую обратную связь от человека, адаптируясь и генерируя новые выразительные модели поведения, комбинируя существующие».
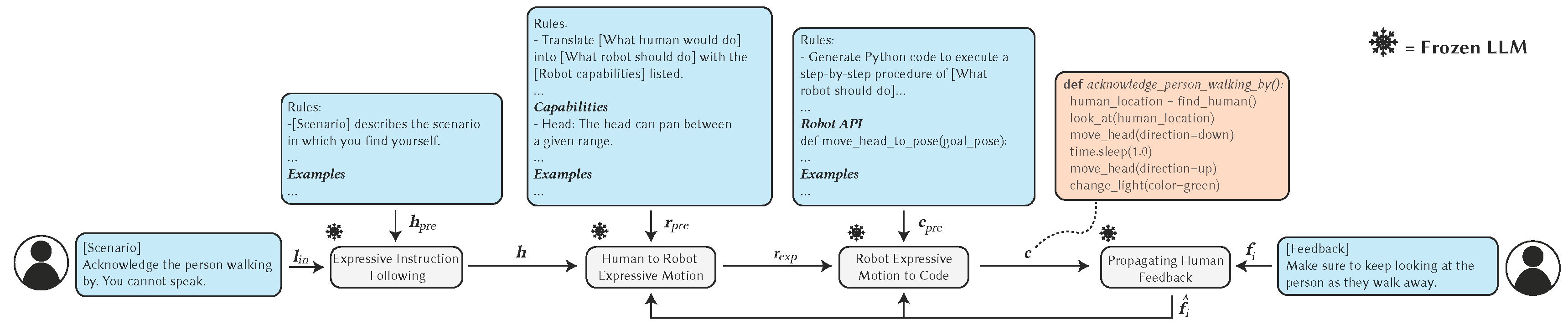
В основе GenEM лежат на инструкции, написанные на естественном языке. Входными данными может быть выразительное поведение: «Кивни головой», или описание социального контекста, в котором робот должен следовать социальным нормам. Далее, несколько LLM-агентов используются для автономной генерации выразительного поведения робота на основе инструкций на естественном языке. Каждый агент играет определенную роль в анализе социального контекста и сопоставлении желаемого выразительного поведения с вызовами API для робота:
1. Первый LLM-агент использует цепочку мыслей (chain-of-thought reasoning), чтобы описать, как человек будет реагировать в такой ситуации.
2. Другой агент LLM переводит выразительные движения человека в пошаговую процедуру, основанную на функциях робота. Например, он может приказать роботу кивнуть, используя возможности наклона головы, или имитировать улыбку, отображая на дисплее робота заранее запрограммированный световой узор.
3. Третий LLM-агент отображает пошаговую процедуру выразительного движения робота в исполняемый код на основе команд API робота.
В качестве дополнительного шага GenEM может учесть отзывы людей и использовать LLM для обновления сгенерированного экспрессивного поведения.
Что важно — ни один из этих шагов не требует специального обучения LLM, которую необходимо лишь адаптировать к возможностям и спецификациям API робота.
В своей работе, в качестве LLM для анализа контекста и создания выразительного поведения исследователи использовали GPT-4 от OpenAI (gpt-4-0613, параметр temperature=0).
Для проверки работы GenEM, исследователи сравнили поведение, созданное на мобильном роботе с использованием двух вариантов GenEM — с обратной связью от пользователя и без нее, с набором сценариев поведения, разработанных профессиональным аниматором персонажей.
Опросы десятков пользователей показали, что, в целом, пользователи находят поведение, созданное GenEM, столь же понятным, как и поведение, тщательно прописанное профессиональным аниматором.
Так же исследователи обнаружили, что модульный и многоэтапный подход (LLM-агенты), используемый в GenEM, намного лучше, чем использование только одной LLM для прямой трансляции инструкций в поведение робота.
А что еще более важно, благодаря своей структуре, GenEM не зависит от типа робота, к которому он применяется и может использовать способности LLM к рассуждению, чтобы использовать простой набор роботизированных действий для создания сложного выразительного поведения.
Таким образом, ключевая идея проекта GenEM — использовать богатый социальный контекст, доступный LLM, для создания адаптируемого и компонуемого выразительного поведения роботов.
Данный подход с использованием больших языковых моделей позволяет создавать адаптируемые и компонуемые выразительные движения роботов, но нужно дальнейшее изучение как будет работать данный метод с увеличением пространства действий робота и как можно отрабатывать индивидуальные предпочтения пользователей, относительно ожидаемого поведения робота в разных ситуациях.
Статьи
- Mahadevan K. et al. Generative Expressive Robot Behaviors using Large Language Models //arXiv preprint arXiv:2401.14673. – 2024.
Ссылки
- Generative Expressive Robot Behaviors Using Large Language Models
- DeepMind’s GenEM uses LLMs to generate expressive behaviors for robots
По теме
- Awesome-LLM-Robotics — список статей про использование больших языковых моделей в робототехнике
- Microsoft предложила использовать ChatGPT для управления роботами
- Роботы Everyday Robots от Alphabet начали выполнять уборку в офисе Google
- TidyBot — персонализированный робот-помощник на основе больших языковых моделей
- Проявление роботом эмоций определяется людьми как его способность мыслить
- Disney Research: быстрые движения роботов хуже воспринимаются человеком
- Эксперимент по взаимодействию роботов-мусорщиков и людей
- Наши будущие отношения с роботами будут похожи на наши отношения с одомашненными животными
- Исследование привлекательности лиц роботов
- Почему на Западе опасаются роботов, а в Японии — нет?
- Роботов научили бояться детей
- Учиться жить с роботами